




题文
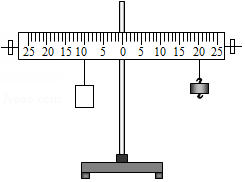
小梅在物理老师的指导下,利用一个重物、细线、若干钩码及杠杆来探究“杠杆平衡的条件”。
(1)实验前,为便于力臂的测量,她应通过调节杠杆两端的 使杠杆在 位置平衡。
(2)实验时,小梅决定先保持阻力 和阻力臂 不变,探究“杠杆平衡时,动力臂和动力之间的关系”。
于是,她用细线将重物固定到杠杆左侧某一位置处;然后在杠杆右侧用细线悬挂一个钩码,移动其悬挂的位置,使杠杆重新在水平位置平衡,如图所示,将动力 和动力臂 记录下来。
接下来,她要改变 并移动其悬挂的位置,多次重复前面的实验,并把相应的数据记录下来。
(3)小梅通过实验得到的实验数据如表1所示。
表一 保持阻力 和阻力臂 不变,探究杠杆平衡时动力臂和动力之间的关系
实验序号 |
动力 |
动力臂 |
1 |
0.5 |
0.20 |
2 |
1.0 |
0.10 |
3 |
1.5 |
0.07 |
4 |
2.0 |
0.05 |
5 |
2.5 |
0.04 |
分析表1中的数据,小梅得出的结论是:保持阻力和阻力臂不变,杠杆平衡时,动力臂 跟动力 成 关系。
(4)在前面实验的基础上,小梅进一步猜想:在更普遍的情况下,杠杆平衡时可能满足“动力 动力臂 阻力臂 阻力臂 ”
为了验证小梅的这个猜想,小丽通过实验得到的实验数据如表2所示
表2 探究杠杆平衡时,动力 、动力臂 和阻力 、阻力臂 之间的关系
实验次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
1.0 |
0.10 |
1.0 |
0.10 |
2 |
1.5 |
0.08 |
1.5 |
0.08 |
3 |
2.0 |
0.07 |
2.0 |
0.07 |
小梅认为,表2中小丽的实验数据缺乏普遍性,用来验证她的猜想不够充分,于是对小丽的实验和收集数据提出了具体的建议。
小梅的建议是:小丽还要在 的情况下进行实验和收集数据。
相关知识点
推荐试卷

 粤公网安备 44130202000953号
粤公网安备 44130202000953号