自动驾驶汽车是一种通过电脑系统实现无人驾驶的智能汽车,正不断走进我们的生活。
(1)驾驶员进入汽车后,电脑系统会对驾驶员的脸部特征进行识别。从生物学角度看,人的脸部特征是由 决定的。
(2)2019年8月,红旗 自动驾驶汽车在湖南长沙开展测试。汽车从长沙出发,历时3小时20分钟到达武汉,行驶距离286千米。测试过程中红旗 汽车的平均速度是多少千米 时?
(3)质量为1.8吨的红旗 自动驾驶汽车,在水平公路上匀速直线行驶时,受到的阻力为车重的0.2倍,此时汽车受到的牵引力为多少牛?
小明在卸货点用水平方向的推力把箱子推到 处,如图甲。经过 处4秒后在 处遇到方方,方方迅速取下小箱子,1秒后在 处小明调整了推力,继续将大箱子推到 处才撤去推力。 段推力与时间的关系如图乙,箱子速度与时间的关系如图丙。已知大箱子底面积为0.5平方米,质量为20千克,小箱子质量为5千克。
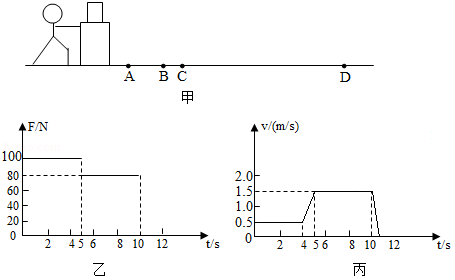
(1) 段大箱子受到的摩擦力大小为 。
(2) 段大箱子对地面的压强为 。
(3) 段小明推力所做的功为 。
运用知识解决问题:

(1)活塞式抽水机工作原理如图1所示,提起活塞时,阀门 关闭,管外的水在 的作用下进入圆筒。
(2)请画出木块在斜面上匀速下滑时的受力示意图。
(3)如图3,轻质杠杆的 ,物体 的重力为 ,小雨的重力为 ,双脚与地面的接触面积为 .小雨在 端施加竖直向上的力使杠杆水平平衡,求小雨对地面的压强是多少?请写出解题过程,并画出与解题过程相应的受力分析示意图。
在拓展课上,小泉同学模拟某建筑工地上拉动工件的情景,设置了如图所示的滑轮组。他用该滑轮组在4秒内将一个重为100牛的物体,沿着水平地面匀速拉动了2米。人的拉力为18牛,物体移动时受到地面的摩擦力为物重的0.35倍,不计绳重及机械的摩擦。求:
(1)人的拉力所做的功。
(2)人的拉力做功的功率。
(3)动滑轮受到的重力。

甲、乙两位同学对“雨滴的下落速度是否跟雨滴的大小有关”持有不同的意见,于是他们对此展开研究。他们从网上查到,雨滴在下落过程中接近地面时受到的空气阻力与雨滴的横截面积 成正比,与雨滴下落速度 的平方成正比,即 (其中 为比例系数,是个定值),雨滴接近地面时可看做匀速直线运动。把雨滴看做球形,其半径为 ,密度为 ,比热为 ,球的体积为 .(注 所有结果均用字母表示)
(1)半径为 的雨滴重力为 。
(2)在接近地面时,大雨滴的下落速度 小雨滴的下落速度(选填“大于”“等于”“小于” ,写出推理过程。
(3)假设半径为 的雨滴在近地面下落 高度的过程中,重力对它所做的功全部转化为雨滴的内能,则雨滴的温度升高了多少?
如图所示,将密度为0.6克 厘米 、高度为10厘米,底面积为20厘米 的圆柱体放入底面积为50厘米 的容器中,并向容器内加水。 取10牛 千克)
(1)当水加到2厘米时,求圆柱体对容器底的压力大小。
(2)继续向容器中加水,当圆柱体对容器底压力为0时,求圆柱体在液面上方和下方的长度之比。
如图甲,有一轻质杆,左右各挂由同种金属制成、质量分别为 和 的实心物块后恰好水平平衡。
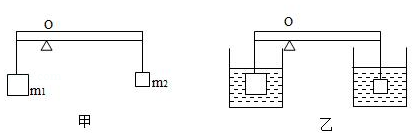
(1)求左右悬挂点到支点 的距离 与 之比。
(2)将两物分别浸没于水中(如图乙),杆将会 (选填“左端下降”“右端下降“或“仍然平衡” ,试通过推导说明。
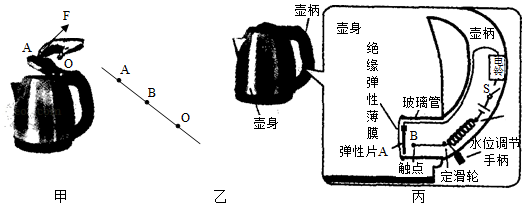
小明的奶奶在家中用电水壶接水时,由于壶口较小,壶盖挡视线,很难观察到壶中水位的变化,结果水从壶中溢出洒到地上,小明一边帮奶奶擦地上的水,一边想:如果给水壶安装一个报警器,当水位达到一定高度时,报警器发出声音,提示水接好了,这样就方便多了。
(1)小明找来家中的电水壶,如图甲所示,观察电水壶的外观并研究它的使用过程,发现其中涉及一些物理知识,下列说法正确的是 (填字母)
A.向壶中注水时,听到的声音是通过空气传入到人耳的
B.金属壶身“反光”是发生了漫反射
C.烧水时壶嘴冒出的“白气”是液化现象
D.注水后壶底看起来变浅了,是光的折射现象
(2)当用力F打开壶盖时,壶盖相当于一个杠杆,请你在图乙中画出壶盖所受重力G的示意图和重力的力臂I(O为支点,B为壶盖的重心,A为F的作用点)。
(3)小明认真思考后,结合学过的力学和电学知识,设计了如图丙所示的报警电路,以下是小明的设计方案,请将其补充完整。
①报警器的水中部分是一个玻璃管,它的一端被绝缘弹性薄膜封闭,报警电路的一部分在玻璃管内,其中弹性片A靠近薄膜,使用时,闭合报警电路开关S,向壶内注水,随着壶中水位的升高、水对薄膜的压力逐渐 (填“变大”或“变小”),弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水。
②为了满足不同的注水高度要求,该电水壶的报警水位高度可以调节,水位调节手柄的一端固定在报警电路中长度可调的弹簧上,水位调节手柄可以移动,并能固定在不同挡位的卡槽中,当水位调节手柄移动时,触电B可以随着它左右移动,请分析该报警电路并说明,想要使报警器在更低的水位报警吗,可以调节水位调节手柄,使触点B
向 (填“左”或“右”)移动。
如图所示是探究“滑动摩擦力的大小与什么因素有关”的实验。器材有:木块A一块、砝码一个,弹簧测力计一个,长木板一块和棉布一块
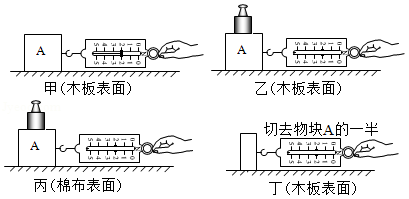
(1)实验时,用弹簧测力计沿水平方向拉木块A,使其在长木板上做 直线运动,此时弹簧测力计示数的大小等于滑动摩擦力的大小;
(2)甲实验中,木块A受到的摩擦力为 N;
(3)比较甲、乙实验,可以探究滑动摩擦力的大小与 有关;比较 实验可以探究滑动摩擦力的大小与接触面的粗糙程度有关;
(4)比较甲、丁实验,发现甲实验弹簧测力计的示数大于丁实验弹簧测力计的示数,小明得出;滑动摩擦力的大小与接触面积的大小有关,你认为他的结论是 (选填“正确”或“错误”)的;
(5)本实验采用的探究方法是 (选填“控制变量法”或“等效替代法”)。
仔细阅读材料,根据材料提供的信息回答问题:
我们已经学过杠杆的力臂和杠杆的平衡条件,如果把这些知识稍加拓宽和延伸,就可尝试用新的方法来解决一些实际问题.有固定转动轴的物体在力的作用下处于静止或匀速转动的状态称为力矩平衡状态.物理学中把力和力臂的乘积叫做力对转动轴的力矩.力矩用M表示,即M=FL,式中L为力臂,力臂是转动轴到力的作用线的距离.在国际单位制中,力矩的单位是牛顿•米,符号为N•m.引入力矩概念后,杠杆的平衡条件可叙述为:
使杠杆沿顺时针转动的力矩与使杠杆沿逆时针转动的力矩相等.用公式表示为:M顺=M逆.
(1)力矩的表达式为:M= FL ,力矩的国际单位为 N•m .
(2)用垂直于门的力推门,推力F=80N,手到门轴的距离为0.3m,则F对门轴的力矩M为 24 N•m.
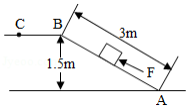
(3)如图所示,一根均匀木棒OA可绕过O点的水平轴自由转动,现有一方向不变的水平力F作用于该棒的A点,使棒从竖直位置缓慢转到偏角θ<90°的某一位置(缓慢转动可视为匀速转动),设M为力F对转轴的力矩,对此过程中M和F判断正确的是 A .(选填字母)
A.M不断变大,F不断变大 B.M不断变大,F不断变小
C.M不断变小,F不断变大 D.M不断变小,F不断变小

按照下列要求,作图。

(1)如图甲,开关S闭合后,根据通电导体ab的电流方向、受到磁场力F的方向,在图中标出磁铁的N极和S极。
(2)如图乙,画出作用在杠杆OA上的拉力F的力臂L1。
(3)如图丙,小球A用钢管固定在小车的支架上,小车向左作匀速直线运动,不计空气阻力,画出小球A受力的示意图。
(4)光线通过图丁中虚线框中的透镜,传播方向发生了改变,请在虚线框中填上合适的透镜。
在探究“影响滑动摩擦力大小的因素”的实验中,装置如图所示,铝块和木块的外形相同,一端带有定滑轮的长木板固定不动,铝块通过细线与弹簧测力计相连。(忽略滑轮的摩擦)
(1)图甲中,将铝块放在水平木板上,竖直向上拉测力计,当铝块沿水平方向做 匀速直线 运动时,铝块所受滑动摩擦力大小等于测力计的示数 ,则 。
(2)比较甲、乙两次实验,可以得出:在 越大,滑动摩擦力越大。
(3)图乙实验完成后,利用原有器材,还可进一步探究滑动摩擦力大小与接触面粗糙程度的关系,请你简要说明实验方案: 。
(4)请你判断:图丙中,铝块水平运动时所受滑动摩擦力 (选填“大于”、“等于”或“小于” 图甲中铝块所受滑动摩擦力。

某兴趣小组用如图所示的实验“探究影响滑动摩擦力大小的因素”,他们提出了如下猜想:
猜想一:滑动摩擦力的大小与接触面间的压力大小有关。
猜想二:滑动摩擦力的大小与接触面的粗糙程度有关。
猜想三:滑动摩擦力的大小与接触面积的大小有关。
(1)在测量滑动摩擦力大小时,必须水平拉着物块做匀速直线运动,滑动摩擦力的大小才等于弹簧测力计
的示数,所用的物理原理是 。
(2)对比 两次实验,可以验证猜想一。由数据可得,滑动摩擦力的大小与接触面间的压力大小 (填“有关”或“无关” ,对比 两次实验,可以验证猜想二。
(3)该小组的同学对比丙,丁两次实验,得出“接触面积越大,滑动摩擦力越大”的结论,你认为该结论正确吗? ,理由是 。

小丽设计了一个防踩踏模拟报警装置,工作原理如图甲所示。 为一水平杠杆, 为支点, ,当水平踏板所受压力增大,电压表示数达到 时,报警器 开始发出报警信号。已知电路中电源电压为 , 的阻值恒为 ,压力传感器 固定放置,其阻值随所受压力 变化的关系如图乙所示,踏板、压杆和杠杆的质量均忽略不计。试问:
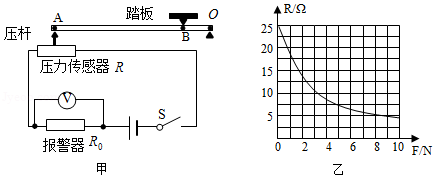
(1)由图乙可知,压力传感器 的阻值随压力 的增大而 减小 ;
(2)当踏板空载时,闭合开关,电压表的示数为多少?
(3)当报警器开始报警时,踏板设定的最大压力值为多少?
(4)若电源电压略有降低,为保证报警器仍在踏板原设定的最大压力值时报警,踏板触点 应向 (选填“左”或“右” 移动,并简要说明理由。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号