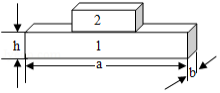
如图所示,一轻质杠杆 .长 ,支点在它中点 .将重分别为 和 的正方体 、 用细绳系于杠杆的 点和 点,已知 , 的边长 。

(1)在图中画出 受力的示意图。
(2)求此时 对地面的压强。
(3)若沿竖直方向将 左右两边各切去厚度为 的部分,然后将 点处系着 的细绳向右移动 时, 对地面的压强减小了 ,求 为多少。
如图甲所示,不吸水的长方体物块放在底部水平的容器中,物块的质量为 ,物块的底面积为 ,物块与容器底部用一根质量、体积均忽略不计的细绳相连,当往容器中缓慢注水至如图乙所示位置,停止注水,此时,物块上表面距水面 ,绳子竖直拉直,物块水平静止,绳子的拉力为 .已知 , 。求:
(1)物块的重力;
(2)物块的密度;
(3)注水过程中,绳子刚好竖直拉直时到图乙所示位置时,水对物块下表面压强的变化范围。

学校机器人兴趣小组进行"精准吊装"实验。7块长短不一的长方体木块均平放在水平地面上,机器人将木块按长度从大到小依次吊装并对称叠放。已知木块的密度相同,高度均为 ,宽度均为 ,不同序号木块的质量如下表,其中 , 取 。
(1)已知1号木块的长度 ,求未叠放时1号木块对地面的压强;
(2)如图,把2号木块吊装到1号木块的上面,求此过程克服木块重力所做的功;
(3)机器人完成全部吊装叠放用时 求整个过程克服木块重力做功的功率。
| 序号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| 质量 |
|
|
|
|
|
|
|
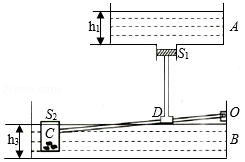
如图为某蓄水池的模拟原理图, 池中的液面高度 ,池底有一出水口,出水口下的活塞通过连杆与杠杆 相连,活塞横截面积
.杠杆可绕 端上下转动,另一端有一中空且内有配重的圆柱形浮子浸入 池中, 是杠杆总长的 ,杠杆对浮子的作用力沿竖直方向。原设计当杠杆水平时,浮子浸入水深 ,活塞恰能堵住出水口。但在使用时发现,活塞离出水口尚有一小段距离时,浮子便不再上浮,此时浮子浸入水深 。若将浮子的配重减少,△ ,杠杆变为水平且活塞恰能堵住出水口。出水口面积略小于 ,计算时可认为相等,水的密度 , 。(活塞与连杆自重、杠杆自重及所受浮力、两池中液面高度的变化均不计。
求:
(1) 池池底水深为 处所受压强;
(2)活塞恰能堵住出水口时连杆对杠杆压力的大小;
(3) 池中浮子的横截面积 。
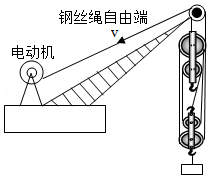
如图所示是打捞物体的模拟装置。现电动机带动钢丝绳自由端以 的速度匀速拉动滑轮组,经过 将体积为 的物体由海底提升到海面,物体离开海面后钢丝绳自由端的速度变为 ,此时电动机的输出功率比物体在海水中时增大了 (不计物体的高度、绳重和摩擦, , 取 , 取 。求:
(1)物体浸没在海水中受到的浮力;
(2)物体在海底时的深度;
(3)物体在海底时受到海水的压强;
(4)物体在海面下匀速上升过程中,该滑轮组的机械效率(不计动滑轮体积)
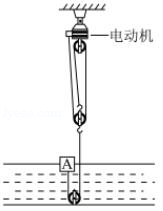
如图所示,实心物体 漂浮在水面上,现利用电动机通过滑轮组拉动 ,使 向下运动。已知 的体积为 ,密度为 .动滑轮重为 ,电动机工作时拉绳子的功率为 且保持不变,不计绳重、摩擦和水的阻力,求:
(1) 的重力;
(2) 浸没在水中受到的浮力;
(3) 向下运动的最小速度;
(4) 向下运动过程中,滑轮组机械效率的最大值。
如图甲所示,滑轮组通过轻质弹簧悬挂于 点,下端悬挂一柱形物体并浸没于装有水的柱形容器中,物体上表面恰好与水平面相平,绳子 端固定,忽略滑轮重,绳重及摩擦。已知容器底面积为 ,水深 ,物体的底面积为 ,高为 ,重为 , , 取 。
(1)求水对容器底的压强;
(2)求水对物体的浮力大小;
(3)求弹簧所受拉力的大小;
(4)若要使柱形物体有 的长度露出水面,需打开阀门 放出多少 的水?(题中弹簧所受拉力 与其伸长量△ 的关系如图乙所示)

如图所示,正方形物块边长为 ,漂浮于足够高的底面积为 的盛有足量水的圆柱形容器中,有 体积露出水面。 取 。求:
(1)该物块受到浮力;
(2)该物块的密度;
(3)若未投入物块时,水对容器底部的压力为 .试求出物块漂浮时,水对容器底部的压力 并求出物块浸没时水对容器底部的压强;
(4)若物块漂浮时与未投入物块时比较,水对容器底部的压强变化了 ,物块浸没时与物块漂浮时水对容器底部的压力之比为 ,则未投入物块时容器中水的深度是多少?

汽车超载是当前发生交通事故的重要原因之一。全国各地设置了许多超载监测站加强监管。如图所示,一辆两轴货车正在水平地面上设置的某种电子地磅秤上称重。先让货车前轮单独开上电子地磅秤,其读数为 ;前轮驶离电子地磅秤,再让后轮单独开上电子地磅秤,其读数为 。国家规定两轴货车限载车货总重 ,请你通过计算分析该货车是否超载。

如图所示,水平地面上有一个扫地机器人,它通过安装在身体底部的三个轮子与地面接触,清扫中利用软毛刷和吸气孔收集灰尘,遇到障碍物能够自动改变方向继续行进,某次机器人开始扫地1min后遇到障碍原地旋转20s,然后继续扫地2min,总行驶路程为36m。已知
机器人质量为3.8kg,圆形身体半径为0.2m,三个轮子与地面接触的总有效面积为2×10﹣4m2,行进中受地面的摩擦阻力大小恒为10N,忽略灰尘质量、毛刷支撑以及气流的影响,取g=10N/kg。求:
(1)机器人清扫工作中对地面的压强;
(2)机器人在本次清扫工作中的平均速度
(3)若机器人某段时间以0.5m/s的速度做匀速直线运动,计算机器人该段时间内牵引力的功率

兴趣小组自制液体密度计请选择其中一种方法完成计算,(两种都做,以方法一为准)
我选择方法 (一/二)完成计算
方法一:精确测量比水小的液体密度
步骤:
①取一上端开口的薄壁厚底玻璃筒,标有0~50mL体积刻度
②将空玻璃筒开口向上放入水中(ρ 水=1×10 3kg/m 3),玻璃筒竖直漂浮,向玻璃筒内加水至50mL刻度线时,在玻璃筒与外侧水面相平处做记号线
③将空玻璃筒开口向上放入酒精中(ρ 酒精=0.8×10 3kg/m 3),向玻璃筒内加水至30mL刻度线时,外侧酒精液面恰好与玻璃筒记号线重合
④将空玻璃筒开口向上放入待测液体中,向玻璃筒内加水至外侧待测液体液面与玻璃筒记号线重合,利用玻璃筒内水的体积刻度,可测得待测液体的密度。 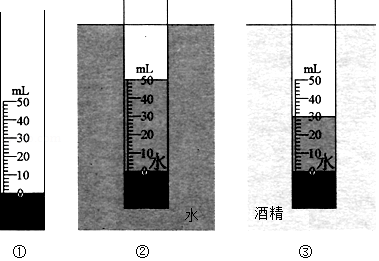
g取10N/kg,问:
(1)每次实验,玻璃筒记号线与外侧液面相平时,其排开外侧液体的体积是多大?
(2)玻璃筒的重力有多大?
(3)该密度计能够测量的液体密度的最小值有多大?
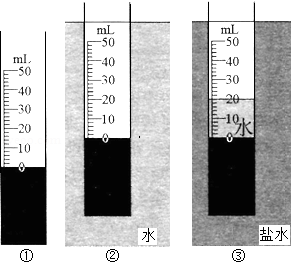
方法二:精确测量比水大的液体密度
步骤:
①取一上端开口的薄壁厚底玻璃筒,标有0~50mL体积刻度
②将空玻璃筒开口向上放入水中(ρ 水=1×10 3kg/m 3),玻璃筒竖直漂浮,在玻璃筒与外侧水面相平处做记号线
③将空玻璃筒开口向上放入盐水中(ρ 盐水=1.2×10 3kg/m 3),向玻璃筒内加水至20mL刻度线时,外侧盐水液面恰好与玻璃筒记号线重合
④将空玻璃筒开口向上放入待测液体中,向玻璃筒内加水至外侧待测液体液面与玻璃筒记号线重合,利用玻璃筒内水的体积刻度,可测得待测液体的密度。
g取10N/kg,问:
(1)每次实验,玻璃筒记号线与外侧液面相平时,其排开外侧液体的体积是多大?
(2)玻璃筒的重力有多大?
(3)该密度计能够测量的液体密度的最大值有多大?
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






