无人驾驶飞机简称”无人机”,无人机的飞行控制系统简称“飞控”。无人机悬停还是飞行、向哪个方向飞行、上升还是下降等飞行指令都由飞控下达,飞控主要由感知飞行姿态的陀螺仪、 定位模块、超声波传感器、气压传感器等各种功能的传感器及控制电路组成。
(1) 定位模块利用 传递信息,其在真空中的传播速度为 。
(2)超声波传感器可探测无人机在飞行时遇到的障碍物,这是因为超声波具有 的特点。
(3)气压传感器可通过测定大气压值获知无人机所在位置的 。
(4)某无人机由输出电压 、容量 的电池提供飞行能量,该电池最多可提供 的电能,若这些电能的 用于飞行,当飞行功率为 时,最长飞行时间为 。
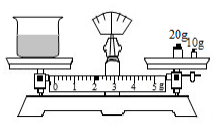
小华利用浮力知识测量橡皮泥的密度。
.测出空烧杯的质量 。
.将橡皮泥捏成碗状,轻放入盛满水的溢水杯中,橡皮泥漂浮,用烧杯接住溢出的水。
.测出烧杯和水的总质量 ,如图。
.将该橡皮泥取出捏成团,放入盛满水的溢水杯中,橡皮泥沉底,用另一相同的空烧杯接住溢出的水。
.测出烧杯和水的总质量 。
(1)调节天平平衡时,发现指针静止时指在分度盘中央刻度线右侧,则应将平衡螺母向 调节,由图可知 。
(2)橡皮泥密度的表达式为 。(用 、 、 等物理量的符号表示)
(3)操作 、 中橡皮泥所受浮力分别为 、 ,则 、 的大小关系是: ,请写出你的推理过程: 。
某自动豆浆机工作时,电热管加热与电动机打浆过程交替进行,其部分参数如下表。
(1)空豆浆机放在水平桌面上,接触面积为 ,对水平面的压强为 。
(2)不计热量损失,加热管正常工作 ,可使 豆浆的温度升高 取 ;豆浆飘出阵阵香味说明分子在 。
(3)电热管通电一段时间后变得很烫,而与豆浆机连接的导线却不怎么热,主要是因为导线 ,产生的热量少;若豆浆机正常打好一次豆浆的消耗的总电能为 ,加热与打浆的时间之比为 ,则打好一次豆浆需 。
额定电压 |
|
电机功率 |
|
加热功率 |
|
净 重 |
|
“海翼”号深海滑翔机,刷新了下潜深度的世界纪录。“海翼”号通过改变自身油囊体体积实现浮沉,如图,下沉时,油囊体积变小,滑翔机所受浮力 ,海水对它的压强将 ;当机翼对水施加向后的推力时,由于力的作用是 ,滑翔机会获得向前的动力;深海中的滑翔机利用声呐装置与海面联系,声呐是利用 波传递信息的。

我国自主设计建造的第一艘航母 已经顺利下水,航母的总质量为 吨,当航母漂浮在水面上时,受到的浮力是 ,此时航母排开水的体积为 。
某日,我国“海翼”号水下滑翔机在太平洋深潜,08时12分02秒,水面轮船声呐接收到正下方“海翼”号发出的声信号:“ ”表达了信号发出时刻的时、分、秒信息。已知海水中声速是 ,发信号时“海翼”号距离轮船 .“海翼”号受到海水压强 ,则其 表面受到海水压力为 。
信号 |
|
|
|
|
|
信息 |
1 |
2 |
3 |
4 |
5 |
信号 |
|
|
|
|
|
信息 |
6 |
7 |
8 |
9 |
0 |
堤坝的形状为上窄下宽,是因为 。2017年1月,美国奥罗维尔水坝漏水,工程师把堵漏板放置上漏水口堵漏,如图所示,堵漏板由钢板、橡胶板叠合而成、堵漏板紧贴坝体的是 (钢板 橡胶板)。

汽车行驶在沙滩、雪地、常因轮胎下陷、打滑而受困。用“脱困板”垫在轮胎下面可化险为夷,“脱困板”下表面宽大,目的是 ;上表面凹凸不平,目的是 。

近年来,镇江市民热衷骑公共自行车出行,某人在水平路面上骑车时,人和车总质量为 ,轮胎与地面总接触面积为 , ,则车对地面的压强 .轮胎上布满花纹是通过 来增大摩擦的,刹车时人由于 会向前倾。
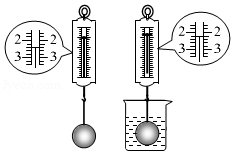
小明用如图所示的实验装置,验证下沉的物体是否受到浮力的作用。由图可知弹簧测力计前后示数变化了 .为了使弹簧测力计前后示数变化更明显,他可采取的措施有 、 (填两种方法)。
汛期,上游的河水挟裹着比平时更多的泥沙,使得河水的密度变 ,对堤坝的压强变 ,说河水是运动的,选择的参照物是 。
将一物块 轻轻放入盛满水的大烧杯中, 静止后,有 的水溢出;再将其轻轻放入盛满酒精的大烧杯中。 静止后,有 的酒精溢出,则 在水中静止时受到的浮力为 . 的体积是 .(酒精的密度是 . 取
生活中,“吸”字表述的现象,其原因各不相同。如图所示,用吸管“吸”饮料时,饮料是在 作用下被“吸”入口中的。用吸尘器“吸”灰尘时,灰尘是由于空气流速越大,压强越 的缘故被“吸”入吸尘器中的。

小明用细线系住重为 的物体,使其一半体积浸入盛满水的溢水杯中,物体排开的水重为 ,此时物体所受的浮力为 ,将物体浸没在水中,此时物体所受的浮力为 ,物体排开的水的体积为 ,松手后,物体将 (选填“上浮”、“悬浮”或“下沉” 。 取
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






