中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行。下列说法正确的是

| A. |
餐盘相对于机器人是运动的 |
| B. |
餐盘中食品受到平衡力作用 |
| C. |
机器人在水平地面匀速前行过程中机械能增大 |
| D. |
机器人在水平地面匀速前行时不受摩擦力的作用 |
如图所示,小杜同学用与丝绸摩擦过的玻璃棒接触验电器的金属球,看到验电器的金属箔张开,在这个过程中

| A. |
玻璃棒和验电器都带负电荷 |
| B. |
玻璃棒带正电荷,验电器带负电荷 |
| C. |
用丝绸摩擦过的玻璃棒产生了电荷 |
| D. |
金属箔张开是因为同种电荷相排斥 |
对生活中物理量的认识,下列数据最接近实际的是
| A. |
教室里课桌的高度约为 |
| B. |
一节新干电池的电压约为 |
| C. |
九年级学生 短跑的成绩约为 |
| D. |
在我们就读的学校,水沸腾时的温度约为 |
下列各项都能使如图瓶内铁屑内能增加,其中属于做功的是

| A. |
不断晃动瓶子 |
B. |
用酒精灯加热 |
C. |
用手捂瓶子 |
D. |
在烈日下照射 |
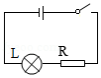
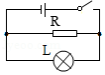
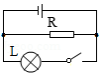
某电热水壶正常状态下,闭合开关,指示灯 亮,同时电热丝 工作;断开开关,指示灯 熄灭,电热丝 不工作。小明用该电热水壶烧水时,发现电热丝 断了,指示灯 仍然亮,四位同学设计了该电热水壶的模拟电路,其中可能正确的是
| A. |
|
B. |
|
| C. |
|
D. |
|
如图为自动垂直升降式车库的停车过程示意图。下列关于汽车匀速上升时的说法,正确的是

| A. |
动能增加,重力势能不变 |
B. |
动能增加,重力势能增加 |
| C. |
动能不变,重力势能不变 |
D. |
动能不变,重力势能增加 |
如图是小柯连接的电路,开关闭合后,发现灯 比 亮,关于该电路分析正确的是

| A. |
通过 的电流比 的电流大 |
| B. |
的电阻比 的电阻大 |
| C. |
两端电压比 两端电压小 |
| D. |
的实际功率比 的实际功率小 |
1897年,英国科学家汤姆生发现了原子内有带负电的电子,而原子是电中性的,由此推测,原子内还有带正电的物质。在此基础上,经过卢瑟福、玻尔等科学家的不断完善和修正,建立了现代原子结构模型。如图是小柯整理的物质微观构成网络图,则汤姆生当年推测的"带正电的物质"相当于图中的
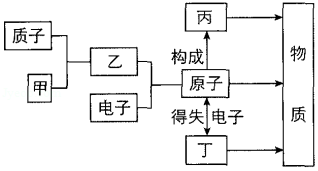
| A. |
甲 |
B. |
乙 |
C. |
丙 |
D. |
丁 |
有甲、乙、丙三个带电的泡沫塑料小球,甲带正电。先用甲靠近乙,发现乙被排斥;再用乙靠近丙,丙被吸引(如图)。则下列判断正确的是

| A. |
乙带正电,丙带正电 |
B. |
乙带负电,丙带负电 |
| C. |
乙带负电,丙带正电 |
D. |
乙带正电,丙带负电 |
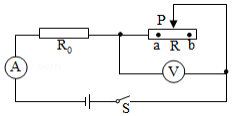
如图所示电路,电源电压不变, 为定值电阻, 为滑动变阻器。闭合开关 ,当滑片 从 点滑到 点过程中,电流表的示数从 变为 .下列各图中,能表示这一过程中电压表示数 与电流表示数 之间关系的是

A.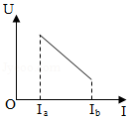 B.
B.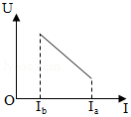
C.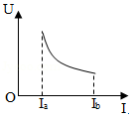 D.
D.
如图所示电路,电源电压不变, 为定值电阻, 为滑动变阻器。闭合开关 ,当滑片 从 点滑到 点过程中,电流表的示数从 变为 .下列各图中,能表示这一过程中电压表示数 与电流表示数 之间关系的是
| A. |
|
B. |
|
| C. |
|
D. |
|
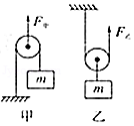
如图所示,用同一个动滑轮先后提升同一物体,使物体以相同的速度匀速上升相同的高度,所用的力分别是 和 ,拉力做功的功率分别是 和 .若不计摩擦、动滑轮重和绳重,则 与 、 与 之间的大小关系是
A. 、 B. 、
C. 、 D. 、
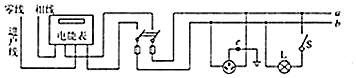
如图是家庭电路示意图。下列说法正确的是

A.电能表示数的单位是千瓦
B.与开关 直接相连的导线 是零线
C.若在导线 和 之间接一个灯泡 ,则 与 串联
D.若 处断开,洗衣机插头插入插座,洗衣机虽能工作但有安全隐患
如图所示,用同一个动滑轮先后提升同一物体,使物体以相同的速度匀速上升相同的高度,所用的力分别是 和 ,拉力做功的功率分别是 和 .若不计摩擦、动滑轮重和绳重,则 与 、 与 之间的大小关系是

| A. |
、 |
B. |
、 |
| C. |
、 |
D. |
、 |
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号