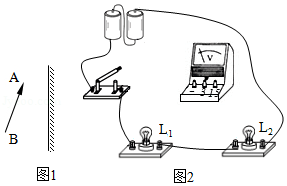
(1)请在图1中作出物体AB在平面镜MN中所成的像A′B′。
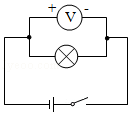
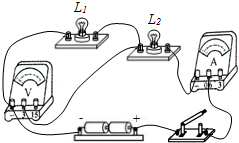
(2)请将图2的实物电路连接完整,要求电压表测量灯泡L2两端的电压
如图所示的实物电路中,有两根导线尚未连接,用笔画线代替导线将电路连接完整。
要求:两灯串联,电压表只测灯L2两端的电压,导线不能交叉,不考虑电压表量程的选择。
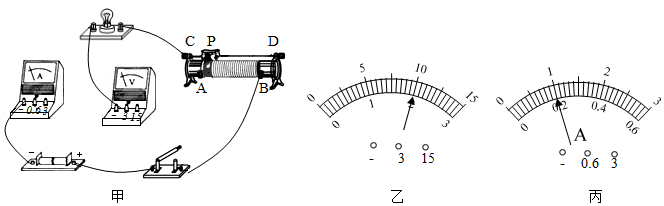
小明用如甲图所示实物图来测量小灯泡两端电压,请回答下列问题:
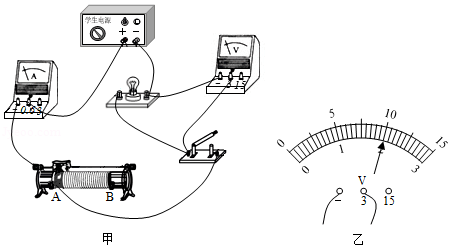
(1)在连接电路过程中,开关应处于 状态。
(2)在闭合开关前,小明应将滑动变阻器的滑片罝于 端(选填“A”或“B”),并采用 的方法来确定电压表的量程。
(3)如乙图所示,电压表的读数为 V。
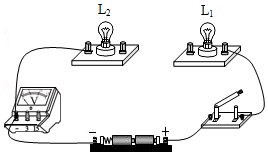
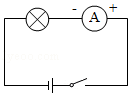
如实物图所示,以下判断正确的是( )
A.灯L1与灯L2并联,电压表测灯L1两端的电压
B.灯L1与灯L2并联,电压表测灯L2两端的电压
C.灯L1与灯L2串联,电压表测灯L1两端的电压
D.灯L1与灯L2串联,电压表测灯L2两端的电压
“测小灯泡额定电功率”的实验中,提供的器材有:电压恒为 的电源,额定电压为 的待测小灯泡,电阻约为 ,电流表 ,电压表 ,开关和导线若干。还有标有“ ”的滑动变阻器 和标有“ ”的滑动变阻器 。
(1)若小明设计电路如图甲所示,请选择合适的量程,并用笔画线代替导线将图甲的实验电路图连接完整;
(2)本实验选择的滑动变阻器是 (选填“ ”或“ ” ;
(3)当滑动变阻器的滑片 移到某一位置时,观察到电压表示数如图乙所示,根据所选正确量程,其示数为 ;
(4)为了测量小灯泡额定功率,此时应该将变阻滑的滑片 向 (选填“ ”或“ ” 移动。当电压达到小灯泡额定电压时,小灯泡正常发光,电流表的示数如图丙所示,则小灯泡的额定功率为 。
(5)小明综合分析实验数据发现,灯泡越亮时灯丝的电阻越大,说明灯丝的电阻 。
下列对四种仪器的操作和使用情况不正确的是
A. 使用前调节天平使横梁平衡B.
使用前调节天平使横梁平衡B. 测量物体的长度时读数
测量物体的长度时读数
C. 测量水的温度D.
测量水的温度D.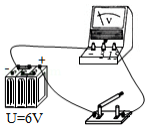 测蓄电池两极间的电压
测蓄电池两极间的电压
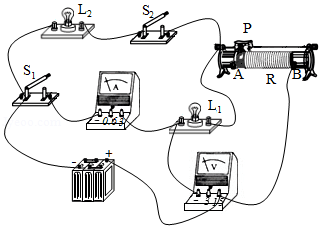
如图所示的电路,下列说法正确的是
| A. |
只闭合开关 ,灯泡 与滑动变阻器并联,电流表测干路电流 |
| B. |
只闭合开关 ,灯泡 与滑动变阻器并联后再与 串联 |
| C. |
闭合开关 ,灯泡 并联后再与滑动变阻器串联 |
| D. |
闭合开关 ,灯泡 被短路,电压表测灯泡 两端的电压 |
通过阅读,小明知道了1791年意大利物理学家伏特发明了最早的电池 伏打电池。在老师的帮助下,小明自制了一个如图所示的伏打电池,但是不能确定哪个金属片是正极。请你帮他设计实验并进行判断。
(1)写出你选用的实验仪器: 。
(2)简述操作方法、实验现象和结论: 。

小华做"用电流表、电压表测电阻"实验,现有电源(电压为1.5伏的整数倍保持不变)、待测电阻、电流表、电压表、滑动变阻器、开关各一个,以及导线若干。他正确串联电路后,将电压表并联在电路中。闭合开关,移动滑动变阻器滑片,将测得的两组数据记录在表一中。小华观察数据思考后重新连接了电压表,将新测得的两组数据记录在表二中。小华通过数据处理求出了待测电阻的阻值,完成实验。
表一
| 实验序号 |
电压表示数(伏) |
电流表示数(安) |
| 1 |
2.6 |
0.18 |
| 2 |
2.3 |
0.20 |
表二
| 实验序号 |
电压表示数(伏) |
电流表示数(安) |
| 3 |
2.2 |
0.20 |
| 4 |
2.6 |
0.24 |
①获得表一实验数据的过程中,小华将电压表并联在 的两端;
②实验中小华所用的电源电压为 伏;
③根据表一中实验序号1的数据,计算此次待测电阻的阻值为 欧;(精确到0.1欧)
④根据实验数据,计算并判断所用滑动变阻器的规格能否为"10欧 2安"。 (需写出计算过程)
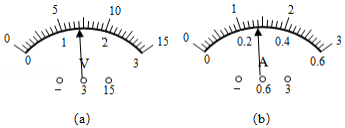
小华做"用电流表、电压表测电阻"实验,现有电源(电压为3伏保持不变)、电流表、电压表、电键和待测电阻 各一个,三个滑动变阻器(分别标有"5欧2安"字样、"10欧2安"字样、"50欧1安"字样),以及导线若干。小华选择其中一个滑动变阻器,正确连接电路,进行实验。实验中,当滑动变阻器滑片 在中间区域某位置时,电压表和电流表的指针位置如图(a)、(b)所示,小华记录第一组数据;然后移动滑动变阻器滑片 ,在电压表指针自图(a)位置转过两小格时记录第二组数据,此时电流表、电压表指针偏转角度相同;接着继续操作完成实验。
①实验中电压表所选的量程为 伏。
②判断实验中电流表所选的量程。 (需要写出计算过程)
③小华的第二组数据中,电压、电流及计算出的待测电阻 的阻值是 。
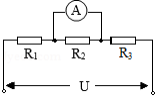
如图所示,3个电阻值均为 的电阻 、 、 串联后接在电压恒定为 的电路中,某同学误将一只电流表并联在电阻 两端,发现电流表的示数为 ,据此可推知电源电压 为 ;若用一只电压表代替电流表并联在 两端,则电压表的示数为 ___ 。
无人驾驶飞机简称"无人机",中国近年来在无人机制造方面进展神速。无人机的飞行控制系统简称"飞控"。无人机悬停还是飞行、向哪个方向飞行、上升还是下降等飞行指令都由"飞控"下达。"飞控"主要由感知飞行姿态的陀螺仪(控制飞行姿态)、 定位模块(与地面传递信息)超声波传感器(探测障碍物)、气压传感器(获取气压获知高度)等各种功能的传感器及控制电路组成。如图是我国制造的"翼龙"多用途无人机,该机表面采用的复合材料受力不易形变,飞机外形采用流线型设计,可携带各种侦察、测距、电子对抗设备及小型空对地打击武器,广泛应用于如灾情监视、军事活动等领域。
(1)请从短文描述中找出蕴含的物理知识。(至少二条,知识点不能重复)
举例:超声波传感器可探测无人机在飞行时遇到的障碍物,这是利用声波能够传递信息。
①
②
(2)经查阅资料获知,"翼龙"无人机机身质量 ,最大载荷质量 。当该机以最大载荷质量停在水平跑道上时,无人机轮胎与地面接触的总面积为 .求此时无人机对水平跑道的压强。
(3)飞机利用超声波传感器来判断离地高度。若某测距传感器的阻值
与离地高度
的关系如图甲所示,图乙是检测电路(电源电压不变),要使高度表(实质是电流表或电压表)示数能随飞行高度的增大而增大,则此高度表应该选用 (选填"电流表或电压表"
,应安装在 (选填"1或2或3"
位置,判断依据是: 。 

试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






 B.
B.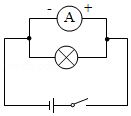
 D.
D.