光滑绝缘的水平面上有垂直平面的匀强磁场,磁场被分成区域Ⅰ和Ⅱ,宽度均为 ,其俯视图如图(a)所示,两磁场磁感应强度随时间 的变化如图(b)所示, 时间内,两区域磁场恒定,方向相反,磁感应强度大小分别为 和 ,一电阻为 ,边长为 的刚性正方形金属框 ,平放在水平面上, 边与磁场边界平行. 时,线框 边刚好跨过区域Ⅰ的左边界以速度 向右运动.在 时刻, 边运动到距区域Ⅰ的左边界 处,线框的速度近似为零,此时线框被固定,如图(a)中的虚线框所示。随后在 时间内,Ⅰ区磁感应强度线性减小到0,Ⅱ区磁场保持不变; 时间内,Ⅱ区磁感应强度也线性减小到0。求:

(1) 时线框所受的安培力 ;
(2) 时穿过线框的磁通量 ;
(3) 时间内,线框中产生的热量 。
在驻波声场作用下,水中小气泡周围液体的压强会发生周期性变化,使小气泡周期性膨胀和收缩,气泡内气体可视为质量不变的理想气体,其膨胀和收缩过程可简化为如图所示的 图像,气泡内气体先从压强为 、体积为 、温度为 的状态 等温膨胀到体积为 、压强为 的状态 ,然后从状态 绝热收缩到体积为 、压强为 、温度为 的状态 到 过程中外界对气体做功为 .已知 和 .求:
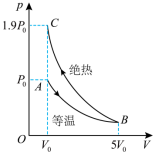
(1) 的表达式;
(2) 的表达式;
(3) 到 过程,气泡内气体的内能变化了多少?
某兴趣小组设计了测量盐水电导率的实验。所用器材有:电源 (电动势恒定,内阻可忽略);毫安表mA(量程 ,内阻可忽略);电阻 (阻值 )、 (阻值 )、 (阻值 )和 (阻值 );开关 和 ;装有耐腐蚀电极板和温度计的有机玻璃样品池;导线若干。请完成下列实验操作和计算。
(1)电路连接
图(a)为实验原理图.在图(b)的实物图中,已正确连接了部分电路,只有 一端的导线还末连接,该导线应接到 的________(填“左”或“右”)端接线柱
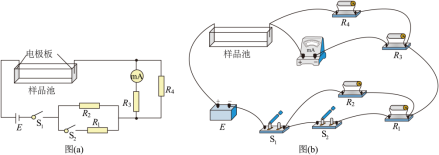
(2)盐水电导率和温度的测量
①测量并记录样品池内壁的长宽高.在样品池中注满待测盐水
②闭合开关 ,________开关 ,毫安表的示数为 ,记录此时毫安表的示数;计算得到流过样品池的电流 为________
③________开关 ,毫安表的示数为 ,记录此时毫安表的示数;计算得到流过样品池的电流 为________
④断开开关 ,测量并记录盐水的温度
(3)根据上述数据,计算得到样品池两电极板间待测盐水的电阻为________ ,进而可求得该温度时待测盐水的电导率。
某同学用激光笔和透明长方体玻璃砖测量玻璃的折射率,实验过程如下:
(1)将玻璃砖平放在水平桌面上的白纸上,用大头针在白纸上标记玻璃砖的边界
(2)①激光笔发出的激光从玻璃砖上的 点水平入射,到达 面上的 点后反射到 点射出.用大头针在白纸上标记 点、 点和激光笔出光孔 的位置
②移走玻璃砖,在白纸上描绘玻璃砖的边界和激光的光路,作 连线的延长线与 面的边界交于 点,如图(a)所示

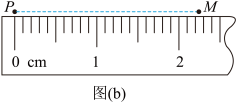
③用刻度尺测量 和 的长度 和 . 的示数如图(b)所示, 为________ 。测得 为
(3)利用所测量的物理量,写出玻璃砖折射率的表达式 ________ ;由测得的数据可得折射率 为________(结果保留3位有效数字)
(4)相对误差的计算式为 。为了减小 测量的相对误差,实验中激光在 点入射时应尽量使入射角________。
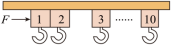
某同学受电动窗帘的启发,设计了如图所示的简化模型.多个质量均为 的滑块可在水平滑轨上滑动,忽略阻力.开窗帘过程中,电机对滑块1施加一个水平向右的恒力 ,推动滑块1以 的速度与静止的滑块2碰撞,碰撞时间为 ,碰撞结束后瞬间两滑块的共同速度为 .关于两滑块的碰撞过程,下列说法正确的有( )
| A. |
该过程动量守恒 |
| B. |
滑块1受到合外力的冲量大小为 |
| C. |
滑块2受到合外力的冲量大小为 |
| D. |
滑块2受到滑块1的平均作用力大小为 |
电子墨水是一种无光源显示技术,它利用电场调控带电颜料微粒的分布,使之在自然光的照射下呈现出不同颜色.透明面板下有一层胶囊,其中每个胶囊都是一个像素.如图所示,胶囊中有带正电的白色微粒和带负电的黑色微粒.当胶囊下方的电极极性由负变正时,微粒在胶囊内迁移(每个微粒电量保持不变),像素由黑色变成白色.下列说法正确的有( )

| A. |
像素呈黑色时,黑色微粒所在区域的电势高于白色微粒所在区域的电势 |
| B. |
像素呈白色时,黑色微粒所在区域的电势低于白色微粒所在区域的电势 |
| C. |
像素由黑变白的过程中,电场力对白色微粒做正功 |
| D. |
像素由白变黑的过程中,电场力对黑色微粒做负功 |
人们用滑道从高处向低处运送货物.如图所示,可看作质点的货物从 圆弧滑道顶端 点静止释放,沿滑道运动到圆弧末端 点时速度大小为 。已知货物质量为 ,滑道高度 为 ,且过 点的切线水平,重力加速度取 。关于货物从 点运动到 点的过程,下列说法正确的有( )

| A. |
重力做的功为 |
B. |
克服阻力做的功为 |
| C. |
经过 点时向心加速度大小为 |
D. |
经过 点时对轨道的压力大小为 |
如图(a)所示,太阳系外的一颗行星P绕恒星Q做匀速圆周运动。由于P的遮挡,探测器探测到Q的亮度随时间做如图(b)所示的周期性变化,该周期与P的公转周期相同。已知Q的质量为 ,引力常量为G。关于P的公转,下列说法正确的是( )

| A. |
周期为 |
B. |
半径为 |
| C. |
角速度的大小为 |
D. |
加速度的大小为 |
用一台理想变压器对电动汽车充电,该变压器原、副线圈的匝数比为 ,输出功率为 ,原线圈的输入电压 。关于副线圈输出电流的有效值和频率正确的是( )
| A. |
, |
B. |
, |
C. |
, |
D. |
, |
某小型医用回旋加速器,最大回旋半径为 ,磁感应强度大小为 ,质子加速后获得的最大动能为 .根据给出的数据,可计算质子经该回旋加速器加速后的最大速率约为(忽略相对论效应, )( )
| A. |
|
B. |
|
C. |
|
D. |
|
渔船常用回声探测器发射的声波探测水下鱼群与障碍物.声波在水中传播速度为 ,若探测器发出频率为 的声波,下列说法正确的是( )
| A. |
两列声波相遇时一定会发生干涉 |
| B. |
声波由水中传播到空气中,波长会改变 |
| C. |
该声波遇到尺寸约为 的被探测物时会发生明显衍射 |
| D. |
探测器接收到的回声频率与被探测物相对探测器运动的速度无关 |
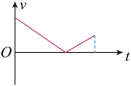
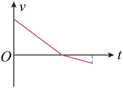
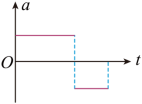
铯原子喷泉钟是定标“秒”的装置。在喷泉钟的真空系统中,可视为质点的铯原子团在激光的推动下,获得一定的初速度。随后激光关闭,铯原子团仅在重力的作用下做竖直上抛运动,到达最高点后再做一段自由落体运动。取竖直向上为正方向。下列可能表示激光关闭后铯原子团速度 或加速度 随时间 变化的图像是( )
| A. |
|
B. |
|
C. |
|
D. |
|
如图所示,可视为质点的机器人通过磁铁吸附在船舷外壁面检测船体。壁面可视为斜面,与竖直方向夹角为 。船和机器人保持静止时,机器人仅受重力 、支持力 、摩擦力 和磁力 的作用,磁力垂直壁面。下列关系式正确的是( )

| A. |
|
B. |
|
C. |
|
D. |
|
理论认为,大质量恒星塌缩成黑洞的过程,受核反应 的影响。下列说法正确的是( )
| A. |
Y是 粒子, 射线穿透能力比 射线强 |
B. |
Y是 粒子, 射线电离能力比 射线强 |
| C. |
Y是 粒子, 射线穿透能力比 射线强 |
D. |
Y是 粒子, 射线电离能力比 射线强 |
某同学设计了一种粒子加速器的理想模型。如图所示, 平面内,x轴下方充满垂直于纸面向外的匀强磁场,x轴上方被某边界分割成两部分,一部分充满匀强电场(电场强度与 轴负方向成 角),另一部分无电场,该边界与y轴交于M点,与x轴交于N点。只有经电场到达N点、与 轴正方向成 角斜向下运动的带电粒子才能进入磁场。从M点向电场内发射一个比荷为 的带电粒子A,其速度大小为 、方向与电场方向垂直,仅在电场中运动时间T后进入磁场,且通过N点的速度大小为 。忽略边界效应,不计粒子重力。
(1)求角度 及M、N两点的电势差。
(2)在该边界上任意位置沿与电场垂直方向直接射入电场内的、比荷为 的带电粒子,只要速度大小适当,就能通过N点进入磁场,求N点横坐标及此边界方程。
(3)若粒子A第一次在磁场中运动时磁感应强度大小为 ,以后每次在磁场中运动时磁感应强度大小为上一次的一半,则粒子A从M点发射后,每次加速均能通过N点进入磁场。求磁感应强度大小 及粒子A从发射到第n次通过N点的时间。

试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号