图是液压汽车起重机从水中打捞重物的示意图。C是卷扬机,E是液压机的柱塞,能够竖直向上支撑起重臂OMB。在起重臂的两端分别固定有定滑轮,图中虚线框内是悬挂在起重臂B端的滑轮组(未画完整,其中A是定滑轮),卷扬机经O点和B点的定滑轮拉动滑轮组的钢丝绳自由端K,使重物始终以恒定的速度匀速上升。当重物完全浸没在水中上升的过程中,地面对起重机的支持力N1为1.225×105N,柱塞E对起重臂的支撑力为F1,卷扬机对钢丝绳自由端K的拉力T1为6.25×103N,滑轮组的机械效率为η;重物被完全拉出水面后上升的过程中,地面对起重机的支持力N2为1.375×105N,柱塞E对起重臂的支撑力为F2,卷扬机的输出功率P2为5kW,对钢丝绳自由端K的拉力为T2。已知定滑轮A的质量mA为200kg,虚线框内动滑轮的总质量mD为250kg,F1:F2=9:14。若不计起重臂、钢丝绳的质量及滑轮组的摩擦,g取10N/kg,求: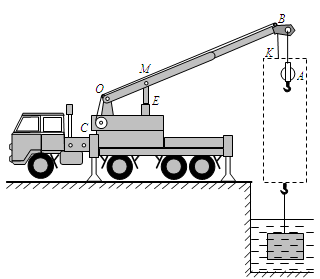
(1)被打捞的重物浸没在水中时受到的浮力F浮;
(2)滑轮组的机械效率η;
(3)卷扬机拉动钢丝绳的速度v。
图是某科研小组设计的在岸边打捞水中物品的装置示意图。O为杠杆BC的支点,CO:OB=1:4。配重E通过绳子竖直拉着杠杆C端,其质量mE=644kg。定滑轮和动滑轮的质量均为m0。人拉动绳子,通过滑轮组提升浸没在水中的物品。当物体A在水面下,小明以拉力F1匀速竖直拉动绳子,滑轮组的机械效率为η1,配重E对地面的压力为N1;当物体A完全离开水面,小明以拉力F2匀速竖直拉动绳子,滑轮组的机械效率为η2,配重E对地面的压力为N2。已知:GA=950N,η2=95%,N1:N2=6:1,绳和杠杆的质量、滑轮与轴及杠杆支点处的摩擦、水对物体A的阻力均可忽略不计,g取10N/kg。求:
(1)物体在水面下受到的浮力;
(2)F1:F2的值
(3) η1的大小。
小明设计的压力传感器如图。它的主要构成部分:支板和压力杠杆ABO,压力传感器R(电阻值会随所受压力大小发生变化的可变电阻),显示压力大小的仪表A(实质是电流表)、滑轮组合(滑轮组合由动滑轮Q和安装在水平杆CD上的两个定滑轮组成)。图中水平杆CD与竖直杆EH、DI组合成支架固定在水平地面上。设支板和压力杠杆ABO、杠杆组件的质量、绳的质量,滑轮与轴的摩擦可以忽略不计。接通电源后,压力传感器两端的电压恒为4.8V,取g=10N/kg。其中AO∶BO=5∶1,压力传感器R的电阻与所受压力的关系如下表所示
| 压力F/N |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
… |
电阻R/ |
300 |
270 |
240 |
210 |
180 |
150 |
120 |
… |
当支板上放重物G1=650N时,小明以拉力F1匀速拉动绳子,使物体压在支板上时,压力杠杆ABO在水平位置平衡,此时电流表的示数为20mA;当支板上放重物G2=1500N时,小明以拉力F2匀速拉动绳子,使物体压在支板上时,压力杠杆ABO仍在水平位置平衡,此时电流表的示数为32mA;且F1: F2=2:3
请回答:(1)当电流表的示数为25 mA且压力杠杆ABO在水平位置平衡时,支板处受到的压力为多大?(2)若人的体重为700N,当支板上放重物G1和重物G2两种情况下,人匀速拉绳时对地面的压强P1和P2之比为多少?
利用图所示装置,把质量为4kg、密度为4×103kg/m3的薄石块从水面下5m处拉出水面后,再提升了8m,共用时间10s。动滑轮重为20N(不计绳重及滑轮与轴间的摩擦及水对石块的阻力,设石块的两个上升过程都为匀速)。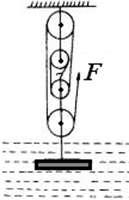
(1)当薄石块浸没在水中5m深处时,它受到的水的压强是多少?
(2)当薄石块浸没在水中时,它受到的浮力是多少?
(3)在整个过程中拉力F做功的功率是多少?(可近似认为石块离开水面前浮力大小不变)
如图甲所示,正方体A边长0.2m,作为配重使用,杠杆OE:OF=2:3,某同学用这个装置和一个密闭容器D提取水中的圆柱体B, 圆柱体B的体积是密闭容器D的 ;旁边浮体C的体积是0.1m3,该同学站在浮体C上,总体积的
;旁边浮体C的体积是0.1m3,该同学站在浮体C上,总体积的 浸入水中;该同学用力拉动滑轮组绕绳自由端,手拉绳的功率P和密闭容器D匀速被提升的距离关系如图24乙所示;密闭容器D上升速度0.05m/s保持不变,密闭容器D被提出水后,圆柱体B从密闭容器D中取出放在浮体C的上面,同时手松开绳子时,浮体C露出水面的体积减少总体积的
浸入水中;该同学用力拉动滑轮组绕绳自由端,手拉绳的功率P和密闭容器D匀速被提升的距离关系如图24乙所示;密闭容器D上升速度0.05m/s保持不变,密闭容器D被提出水后,圆柱体B从密闭容器D中取出放在浮体C的上面,同时手松开绳子时,浮体C露出水面的体积减少总体积的 ;在提升全过程中,配重A始终没有离开地面。两个定滑轮总重10 N.(绳的重力,滑轮与轴的摩擦及水的阻力不计。g=10N/kg),求:
;在提升全过程中,配重A始终没有离开地面。两个定滑轮总重10 N.(绳的重力,滑轮与轴的摩擦及水的阻力不计。g=10N/kg),求: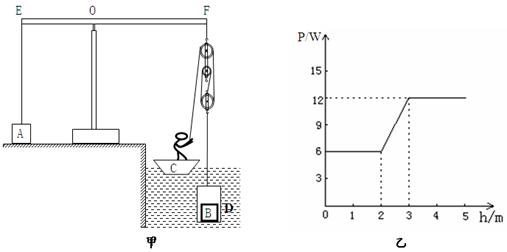
(1)圆柱体B的重力;
(2)密闭容器D离开水面时,滑轮组提升重物B的机械效率;(百分号前面保留整数);
(3)圆柱体B的密度;
(4)在提升全过程中配重A对地面的压强的最大变化量。
如图所示装置,杠杆OB可绕O点在竖直平面内转动,OA∶AB=1∶2。当在杠杆A点挂一质量为300kg的物体甲时,小明通过细绳对动滑轮施加竖直向下的拉力为F1,杠杆B端受到竖直向上的拉力为T1时,杠杆在水平位置平衡,小明对地面的压力为N1;在物体甲下方加挂质量为60kg的物体乙时,小明通过细绳对动滑轮施加竖直向下的拉力为F2,杠杆B点受到竖直向上的拉力为T2时,杠杆在水平位置平衡,小明对地面的压力为N2。已知N1∶N2=3∶1,小明受到的重力为600N,杠杆OB及细绳的质量均忽略不计,滑轮轴间摩擦忽略不计,取g =10N/kg。求:
(1)拉力T1;
(2)动滑轮的重力G。
某校科技小组的同学设计了一个从水中打捞物体的模型,如图所示。其中D、E、G、H都是定滑轮,M是动滑轮,杠杆BC可绕O点在竖直平面内转动,OC∶OB=3∶4。杠杆BC和细绳的质量均忽略不计。人站在地面上通过拉绳子提升水中的物体A,容器的底面积为300 cm2。人的质量是70 kg,通过细绳施加竖直向下的拉力F1时,地面对他的支持力是N1,A以0.6m/s的速度匀速上升。当杠杆到达水平位置时物体A总体积的五分之二露出液面,液面下降了50cm,此时拉力F1的功率为P1;人通过细绳施加竖直向下的拉力F2时,物体A以0.6m/s的速度匀速上升。当物体A完全离开液面时,地面对人的支持力是N2,拉力F2的功率为P2。已知A的质量为75kg, N1∶N2=2∶1,忽略细绳与滑轮的摩擦以及水对物体的阻力,g取10N/kg。求:
⑴当物体露出液面为总体积的五分之二时,物体所受的浮力;
⑵动滑轮M受到的重力G;
⑶P1∶P2的值。
如图是利用电子秤显示水库水位装置的示意图。该装置主要由滑轮C、D,物体A、B以及轻质杠杆MN组成。物体A通过细绳与滑轮C相连,物体B通过细绳与杠杆相连。杠杆可以绕支点O在竖直平面内转动,杠杆始终在水平位置平衡,且MO:MN=1:3。物体B受到的重力为100N,A的底面积为0.04m2,高1 m。当物体A恰好浸没在水中时,物体B对电子秤的压力为F1;若水位下降至物体A恰好完全露出水面时,物体B对电子秤的压力为F2,已知:每个滑轮的重力为20N,F1﹕F2=27﹕7。滑轮与转轴的摩擦、杠杆与轴的摩擦均忽略不计,g取10N/kg。
求:
(1)物体A的底部距水面深为0.75 m时,A受到的浮力F浮。
(2)物体A的密度ρA。
(3)如果把细绳由N端向左移动到N,处,电子秤的示数恰好为零,NN‘﹕MN =17﹕60,此时物体A露出水面的体积V露。
图甲是某科技小组设计的滑轮组模型装置。在底面积为800cm2的圆柱形容器中装有密度为 的液体,边长为20 cm的正立方体物块M完全浸没在液体中匀速竖直上升时,滑轮组的机械效率为
的液体,边长为20 cm的正立方体物块M完全浸没在液体中匀速竖直上升时,滑轮组的机械效率为 ;密度为
;密度为 的物块M全部露出液面后匀速竖直上升时,滑轮组的机械效率为
的物块M全部露出液面后匀速竖直上升时,滑轮组的机械效率为 ,与之比为8:9。滑轮的质量
,与之比为8:9。滑轮的质量 、且
、且 ,细绳的质量、滑轮与轴之间的摩擦、液体对物块M的阻力均忽略不计,液体与物块M的质量与体积关系的图像如图乙示。(g取10N/kg)(人的质量为60kg,与地面的接触面积为300cm2)
,细绳的质量、滑轮与轴之间的摩擦、液体对物块M的阻力均忽略不计,液体与物块M的质量与体积关系的图像如图乙示。(g取10N/kg)(人的质量为60kg,与地面的接触面积为300cm2)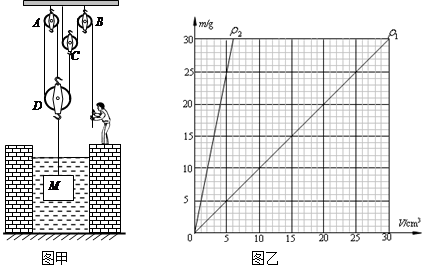
求: (1)物块M离开液面后,液体对容器底部的压强变化了多少?
(2) 物块M露出液面前人对地面的压强P;
(3) 离开液面后如果物块M以0.1m/s的速度匀速上升时,人所提供的拉力的功率。
如图所示,正方体合金块A的边长为0.2m,把它挂在以O为支点的轻质杠杆的M点处,在A的下方放置一个由同种材料制成的边长为0.1m的立方体B,物体B放置在水平地面上;OM:ON =1:3。一个重为640N的人在杠杆的N点通过滑轮组(每个滑轮的自重均为20N)用力F1使杠杆在水平位置平衡,此时A对B的压强为 =1.4×104Pa,人对水平地面的压强为
=1.4×104Pa,人对水平地面的压强为 =1.45×104Pa;若人用力F2=80N仍使杠杆在水平位置平衡,此时物体B对地面的压强为
=1.45×104Pa;若人用力F2=80N仍使杠杆在水平位置平衡,此时物体B对地面的压强为 。已知人单独站在水平地面上,对地面的压强为1.6×104 Pa。(g取10N/kg)求:
。已知人单独站在水平地面上,对地面的压强为1.6×104 Pa。(g取10N/kg)求:
(1)力F1的大小;
(2)合金块的密度;
(3)压强的大小
工人用图所示装置,打捞深井中的边长为30cm的正方体石料,石料的密度为3´103kg/m3。装置的OC、DE、FG三根柱子固定在地面上,AB杆可绕O点转动,AO:OB=1:2,边长为L的正立方体配重M通过绳竖直拉着杆的B端。现用绳子系住石料并挂在滑轮的钩上,工人用力沿竖直方向向下拉绳,使石料以0.2m/s的速度从水中匀速提升。AB杆始终处于水平位置,绳子的质量、轮与轴间的摩擦均不计,g取10N/kg。求:

(1)如果石料在水中匀速上升时滑轮组的机械效率是η1,石料完全离开水面后滑轮组的机械效率是η2,且η1:η2=83:84,求石料在水中匀速上升过程中,工人拉绳的功率多大?
(2)若石料在水中匀速上升时,配重对地面的压强为6500帕,石料完全离开水面后,配重对地面的压强为4812.5帕;求配重M的密度。
在图所示的装置中DC=3m,OD=1m,A、B两个滑轮的质量均为2kg,A是边长为20 cm、密度为 的正方体合金块,当质量为60kg的人用
的正方体合金块,当质量为60kg的人用 80N的力沿竖直方向向下拉绳时,合金块A全部浸没在密度为
80N的力沿竖直方向向下拉绳时,合金块A全部浸没在密度为 的液体中,杠杆恰好在水平位置平衡,此时人对地面的压强为
的液体中,杠杆恰好在水平位置平衡,此时人对地面的压强为 ;若人缓慢松绳,使合金块下降并与容器底接触(但不密合),当人用
;若人缓慢松绳,使合金块下降并与容器底接触(但不密合),当人用 60N的力向下拉绳时,人对地面的压强为
60N的力向下拉绳时,人对地面的压强为 ,容器底对A的压强为
,容器底对A的压强为 。 (杠杆DC的质量不计,
。 (杠杆DC的质量不计, 、
、 )
)
求:(1)液体的密度;(2) 。
。
如图是某同学设计的简易打捞装置结构示意图。AOB是以O点为转轴,长为4m的轻质横梁, AB呈水平状态,AO=1m。在横梁上方行走装置可以在轨道槽内自由移动,行走装置下方固定有提升电动机。提升电动机通过细绳和滑轮组提起重物。固定在水平地面上的配重T通过细绳与横梁A端相连,GT=3000N。当行走装置处于C位置时,开始打捞物体A。质量mA是100kg、体积V为0.04m3 物体A在水中匀速上升时,地面对配重T的支持力是N1,滑轮组的机械效率为75%;当物体A全部露出液面,滑轮组将物体A以v是0.1m/s的速度匀速竖直向上提升1m,此时电动机拉动细绳的功率为P,地面对配重T的支持力是N2;N1∶N2=5∶1,若行走装置和提升电动机及定滑轮的总质量m2是20kg,,忽略细绳与滑轮的摩擦以及水对物体的阻力,g取10N/kg。求
(1)动滑轮的重力G动
(2)电动机拉动细绳的功率P
(3)OC的距离
如图所示 支撑杠杆水平平衡的支架AOB随物体M在液体中能上下运动自动升降,物体M的密度为2.7×103kg/m3,轻质杠杆LOA∶LOB=2∶5。某同学质量为60kg,利用这个装置进行多次实验操作,并将实验数据记录于表格中(表格中F浮为物体所受的浮力、h为物块浸入液体的深度,P为液体对容器底部的压强),在各次操作过程中可认为杠杆始终保持水平。其中一次实验用力F1拉动绳自由端匀速竖直向下运动,该同学对地面的压强为独立站在地面时对地压强的一半,滑轮组的机械效率η=90%。已知,物体M浸没在液体中时,液体深度1.8m(绳的重力、滑轮与轴的摩擦及液体对物体的阻力不计。g=10N/kg)。
| F浮/ N |
100 |
200 |
300 |
400 |
500 |
600 |
600 |
600 |
| h/m |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
| P/ pa |
16725 |
16975 |
17225 |
17425 |
17725 |
18000 |
18000 |
18000 |

求:
(1)拉力F1的大小;
(2)液体的密度;
(3)物体M完全露出液体表面时,滑轮组的机械效率(百分号前面保留整数);
如图甲所示,B是一个固定支架,由立柱和两侧装有定滑轮的水平横梁组成,物体M在横梁上可左右移动,M的左端用钢绳跨过定滑轮与电动机相连,右端用钢绳跨过定滑轮与滑轮组相连,滑轮组下挂一实心物体A,其密度ρA=5×103kg/m3,体积VA=0.024m3。当电动机不工作时(可视电动机对钢绳无拉力作用),将物体A浸没在水中,物体A可以通过滑轮组拉着物体M向右匀速运动;当电动机用一个竖直向下的力F1拉钢绳时,物体A在水面下以速度υ1=0.1m/s匀速上升,滑轮组的机械效率为η1;当物体A完全露出水面后,电动机用力F2拉钢绳,物体A匀速上升,滑轮组的机械效率为η2。在以上过程中,电动机对钢绳的拉力的大小随物体A上升高度的关系如图乙所示,电动机以F1、F2拉钢绳时的功率始终为P。(不计钢绳的质量、滑轮与轴的摩擦、水对物体的阻力。取g =10N/kg)
求:
(1)滑轮组的机械效率η1:η2
(2)电动机的功率P
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






