研究物理问题时,常需要突出研究对象的主要因素,忽略次要因素,将其简化为物理模型。
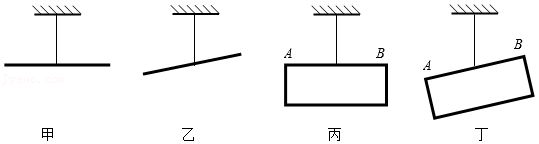
(1)如图甲,一质量分布均匀的杠杆,忽略厚度和宽度,长度不可忽略,用细线将它从中点悬起,能在水平位置平衡。将它绕悬点在竖直面内缓慢转过一定角度后(如图乙)释放,为研究其能否平衡,可将它看成等长的两部分,请在图乙中画出这两部分各自所受重力的示意图和力臂,并用杠杆平衡条件证明杠杆在该位置仍能平衡;
(2)如图丙,一质量分布均匀的长方形木板,忽略厚度,长度和宽度不可忽略,用细线将它从AB边的中点悬起,能在水平位置平衡。将它绕悬点在竖直面内缓慢转过一定角度后(如图丁)释放,木板在该位置能否平衡?写出你的判断依据。
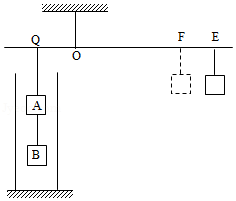
如图所示装置中,轻质杠杆支点为 ,物块 、 通过轻质细线悬于 点,当柱形薄壁容器中没有液体时,物体 悬挂于 点。杠杆在水平位置平衡;当往容器中加入质量为 的水时,为使杠杆在水平位置平衡,物块 应悬于 点。 . 为均匀实心正方体, . 的边长均为 。连接 , 的细线长为 , 的下表面到容器底的距离也为 ,柱形容器底面积为 .已知: , , 、 两点间的距离为 ;三个物块的重为 . , , ; , 。杠杆重力对平衡的影响忽略不计,细线重力忽略不计,物块不吸水。
(1) 、 两点间的距离 ?
(2) 、 两点间的距离 ?
(3)如果剪断物块 上方的细线,往容器中加水,直到容器中水的质量为 ,则物块处于平衡位置后,水对物块 上表面的压力 ?
上海洋山港是全球最大的智能集装箱码头,图甲是将我国自行研制的大型桥吊从运输船上转运到正在建设中的洋山港码头时的情景。桥吊是码头上进行货物装卸的起重机,其简化示意图如图甲中所示,它由控制室、水平横梁 以及两个竖直的支架 和 组成。运输船中不同位置有数个密封的水舱,向这些水舱加水或减水,能保证牵引车将桥吊从运输船转运到码头的过程中,运输船的甲板始终保持水平且与码头的地面相平。
(1)牵引车将桥吊缓缓向右拖向码头时,支架 和 下的轮子会沿顺时针方向转动,请在图乙中画出支架 下的轮子对运输船甲板摩擦力的示意图。

(2)若牵引车拖行桥吊的功率是 , 内将桥吊沿水平方向匀速拖行了 ,则这段时间内牵引车对钢缆的拉力是多少牛?
(3)已知桥吊的总质量是 ,支架 和 的高度均是 , 点到横梁 端的距离是 , 点到横梁 端的距离是 ,桥吊的重心 到横梁 端和 端的距离分别是 和 。试求牵引车将桥吊从图甲所示的位置拖到图丙所示的位置时,运输船的水舱中增加了多少立方米的水?
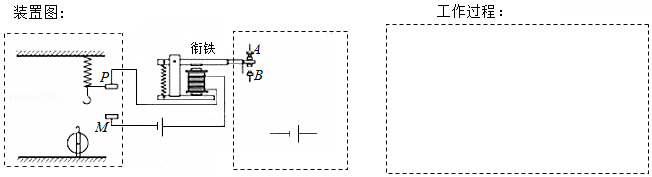
问题解决 设计“超重报警器”:
小雨想利用电磁继电器自制一种“超重报警器”。要求:当物重达到 时,电铃响报警,反之绿灯亮显示正常。他找来以下器材:电磁继电器(部分电路已接好),轻质硬刻度尺、电铃、绿灯、滑轮各一个,线绳和导线若干,一根轻质硬弹簧,一端已经固定,另一端连接触点 ,弹簧的最大伸长量与触点 、 之间的距离相等,弹簧能承受的最大拉力为 。
请利用上述器材帮小雨制作“超重报警器”在虚线框中完成装置设计,并简述工作过程。
如图所示,质量为8kg,边长为5cm的正方体物块A置于水平地面上,通过细绳系于轻质杠杆BOC的B端,杠杆可绕O点转动,且CO=3BO,在C端用F=20N的力竖直向下拉杠杆,使杠杆在水平位置平衡.(绳重不计,g取10N/kg)
求:
(1)物体A的重力G;
(2)B端细绳的拉力F拉;
(3)物体A对地面的压力F压;
(4)物体A对地面的压强P.
动滑轮在使用时相当于一个杠杆,如图所示,某人用绳子沿着竖直方向通过动滑轮拉住钩码,已知人手的拉力为F,钩码重力为G。
(1)请你在图中标出这只“杠杆”的支点O,画出拉力F、阻力G的力臂(保留作图痕迹)
(2)若不计摩擦,滑轮重和绳重,请用杠杆平衡条件推证:F=G/2
如图甲,托盘天平是实验室里常用来测量的工具。托盘天平上的横梁可以看成一个等臂杠杆,刀口处实际上就是支点,图乙是简化后的示意图。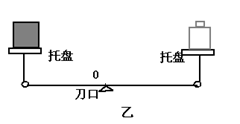
(1)请在图乙上画出动力、动力臂、阻力、阻力臂
(2)试证明:当天平水平平衡时,左盘中物体的质量等于右盘中砝码的质量,
即:m物=m码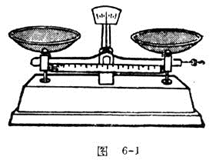
(8分)小明设计了一个测量物体质量的“托盘秤”,图甲是其原理示意图,其中托盘上放置物体,压力传感器R的电阻值会随所受压力大小发生变化,杠杆ABO可绕0点转动,电压表的量程为O~3V(可显示质量大小)。已知OB:BA=1:2,电阻R0=100Ώ。压力传感器R表面能承受的最大压力为400N,该压力传感器能承受的最大压强为2×106 Pa,压力传感器R的电阻值随所受压力变化的图像如图18-乙所示。电源电压恒定不变,秤达到最大称量时,电压表的示数也达到最大值,托盘和杠杆组件的质量忽略不计。求:
(1)当托盘上没有放物体称量时R的大小;
(2)压杆与压力传感器的接触面积;
(3)托盘秤的最大称量;
(4)当托盘秤达到最大称量时R消耗的功率。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






