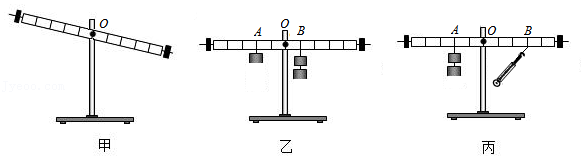
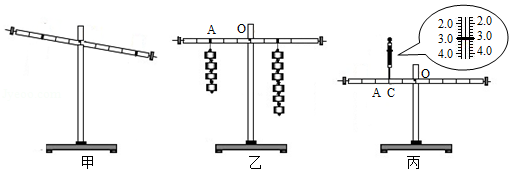
下列是某科学研究小组探究杠杆平衡条件的实验过程:(本实验均使用轻质杠杆)
实验1:在直杠杆水平平衡时(如图甲所示)进行实验,记录多组数据。得出: (注 和 分别表示支点 到 和 的作用点的距离)。在直杠杆倾斜平衡时(如图乙所示)进行实验,也得到了同样的结论。

该结论适用于所有平衡时的杠杆吗?
实验2:科学研究小组用一侧弯曲的杠杆进行如图丙所示的实验,移动钩码,改变钩码数量,记录数据如表,分析表格数据发现上述结论并不成立,但发现一个新的等量关系,即: 。
| 实验次数 |
|
|
|
|
|
| 1 |
1.0 |
10.0 |
0.5 |
21.3 |
20.1 |
| 2 |
1.5 |
20.0 |
1.0 |
31.7 |
29.8 |
| 3 |
2.0 |
30.0 |
2.5 |
25.5 |
24.0 |
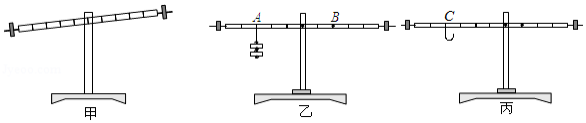
和 (支点到力的作用线的距离)这两个量在研究杠杆平衡条件时,哪个量才是有价值的呢?研究小组的同学观察到:支点到 的作用点的距离 与支点到 的作用线的距离 是相等的。研究小组的同学又进行了实验。
实验
①移动钩码,使杠杆 ,并使杠杆处于平衡状态。
②记录 、 、 和 、 、 。
③改变钩码数量,移动钩码,记录杠杆处于平衡时的多组 、 、 和 、 、 。
④分析实验数据,得出弯杠杆的平衡条件。
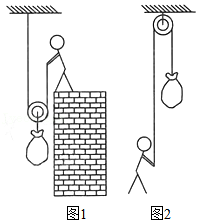
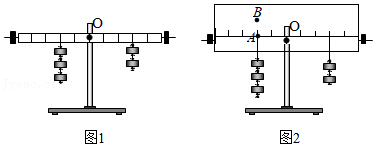
最后,通过科学思维,得出所有杠杆的平衡条件都是: 。杠杆的平衡条件可用于解释许多杠杆应用,如用图1方式提升物体比用图2方式省力,就可用杠杆的平衡条件作出合理解释。
请回答:
(1)在研究一侧弯曲的杠杆时,发现的一个新的等量关系是 。
(2)将实验3中的①填写完整。
(3)"支点到力的作用线的距离"在科学上被称为 。通过探究杠杆平衡条件的实验,使我们深深认识到建立这一科学量的价值。
(4)用图1方式提升物体比用图2方式省力的原因是 。
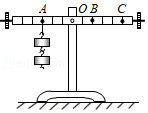
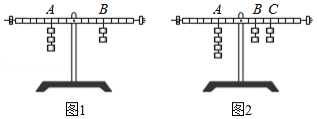
在"探究杠杆平衡条件"的实验中:

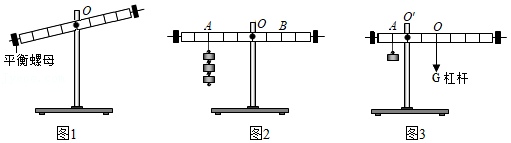
(1)实验前,若使如图1所示的杠杆在水平位置平衡,应将右端的平衡螺母向 (选填"左"或"右" 调节。
(2)实验时,在已调平衡的杠杆两侧分别挂上不同数量的钩码,移动钩码位置,使杠杆重新在水平位置平衡,三次实验获得的数据如表所示。分析可得杠杆的平衡条件是 。
| 次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
| 1 |
1.0 |
15.0 |
1.5 |
10.0 |
| 2 |
1.0 |
20.0 |
2.0 |
10.0 |
| 3 |
2.0 |
15.0 |
3.0 |
10.0 |
(3)为了进一步验证实验结论,又做了如图2所示的实验,在杠杆水平平衡时:
①已知每个钩码的质量均为 ,则此次实验中阻力 大小为 ,阻力臂 为 ; 取
②请你在图中画出动力 的力臂。
在探究"杠杆的平衡条件"实验时。
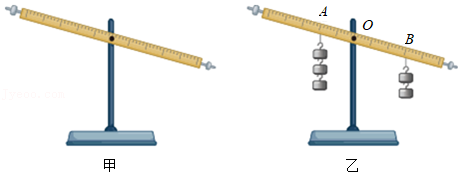
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图1所示,此时,应把杠杆的平衡螺母向 (选填"左"或"右")调节,直至杠杆在 (选填"任意"或"水平")位置平衡;
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图2所示,则在B点处应挂 个钩码,才能使杠杆在原位置平衡。在A、B两点各增加1个的钩码,则杠杆 (选填"能"或"不能")保持平衡;
(3)为了使实验结论具有 (选填"普遍性"或"偶然性"),应改变钩码个数及悬挂位置,多次进行实验;
(4)实验时,不再调节平衡螺母,使杠杆的重心位置保持在O点不变,将支点换到O′点,如图3所示,发现A点处只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为0.5N,则杠杆重力为 N。由此可知,将杠杆支点位置设在 (选填"O"或"O'")点进行实验,能避免杠杆自身重力影响实验结论"动力×动力臂=阻力×阻力臂"的得出。
小勇在探究"杠杆的平衡条件"实验中,所用的实验器材有杠杆、支架、细线、质量相同的钩码若干。
(1)实验装置如图甲所示静止在桌上,此时杠杆 (选填"是"或"不是")平衡状态,为了调节杠杆在水平位置平衡,他应将两侧的平衡螺母向 边调;
(2)小勇在水平平衡的杠杆两边挂上钩码后如图乙所示,他应该在下列方法中选择 使杠杆重新在水平位置平衡;
A.向左调节平衡螺母
B.将左侧钩码向左移动
C.增加右侧钩码个数
(3)进行正确操作后测出力和力臂记录在如下表格中。
| 实验次数 |
动力F 1/N |
动力臂L 1/cm |
阻力F 2/N |
阻力臂L 2/cm |
| 1 |
3 |
4 |
4 |
3 |
| 2 |
4 |
5 |
5 |
4 |
| 3 |
5 |
6 |
6 |
5 |
小勇根据表中记录的多次实验数据分析得出如下结论:动力+动力臂=阻力+阻力臂。小华说他得出的结论是错误的,小华判断的依据是 。
小红和小华在做"探究杠杆平衡条件"实验中:
(1)实验前,把杠杆中心支在支架上,杠杆静止在图甲所示位置,小红将右端的平衡螺母向右调,小华认为也可以将左端的平衡螺母向 调(选填"左"或"右"),使杠杆在水平位置平衡;
(2)实验中,他多次在杠杆两端加挂钩码,并调节钩码位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 ;
(3)如图乙所示,始终保持杠杆在水平位置平衡,小红将弹簧测力计从①位置移动到②位置时,测力计的示数将 (选填"变大"、"变小"或"不变")。
在"探究杠杆平衡条件"的实验中:
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使之在 位置平衡。
(2)如图1,此时杠杆处于平衡状态,如果在杠杆两端各挂一个相同的钩码,杠杆将 (选填"保持平衡""顺时针转动"或"逆时针转动" 。
(3)如图2是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到 点正上方的 点,力臂是线段 (选填" "" "或" " ,此时杠杆 (选填"仍能"或"不能" 保持平衡。
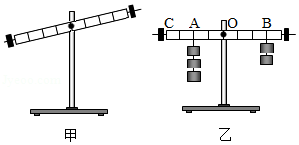
如图,在探究杠杆平衡条件的实验中,每个钩码重1N。
(1)实验前需调节平衡螺母使杠杆处于水平位置,这样做的目的是 ;
(2)若在A点挂有2个钩码,则B点要挂 个钩码才能使杠杆水平平衡;
(3)若A点钩码数不变,取下B点钩码,用测力计作用在C点,为使杠杆再次水平平衡,测力计上最小示数为 N,方向 。
某实验小组在"研究杠杆平衡条件"的实验中:
(1)实验时应先调节杠杆在 位置平衡,若出现如图甲所示情况,应将杠杆的平衡螺母向 (选填"左"或"右")调节。
(2)杠杆平衡后,他们在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上 个相同的钩码。
| 次数 |
F 1/N |
L 1/m |
F 2/N |
L 2/m |
| 1 |
2.0 |
0.05 |
△ |
0.10 |
| 2 |
3.0 |
0.10 |
2.0 |
0.15 |
| 3 |
2.0 |
0.30 |
3.0 |
☆ |
(3)上表是该小组在实验中记录杠杆平衡的部分数据,空格处所缺的数据:△= ,☆= 。
以下是小桂“探究杠杆的平衡条件”的实验。
动力F1/N |
动力臂L1/m |
阻力F2/N |
阻力臂L2/m |
2 |
5 |
1 |
10 |
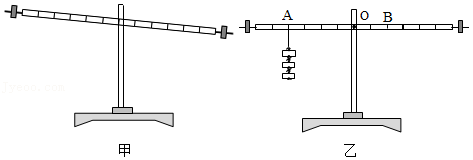
(1)实验前,杠杆静止时如图所示,接下来小桂应将平衡螺母向 端调节,使杠杆处于水平平衡状态。
(2)调节好后,小桂在杠杆两边挂上不同数量的钩码,并不断调节悬挂位置直至杠杆在 位置平衡,将实验数据记录在下表后,分析得出杠杆的平衡条件: 。
(3)小桂仅凭一组实验数据就得出结论的做法是否科学?答: 。
探究杠杆的平衡条件
猜想与假设】
猜想一:动力 动力臂 阻力 阻力臂
猜想二:动力 支点到动力作用点的距离 阻力 支点到阻力作用点的距离
【设计实验与进行实验】
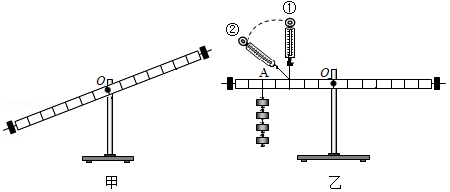
(1)如图甲所示,应将杠杆两端的螺母向 (选填"左"或"右" 调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如表。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如表。
| 实验次数 |
动力 |
间距离 |
阻力 |
间距离 |
|
| 小明 |
1 |
1.0 |
5 |
0.5 |
10 |
| 2 |
1.5 |
10 |
1.0 |
15 |
|
| 3 |
1.0 |
10 |
2.0 |
5 |
|
| 小红和小明 |
4 |
0.8 |
15 |
1.0 |
10 |
| 5 |
1.4 |
15 |
1.0 |
10 |
|
【分析与论证】
根据小明同学的数据可验证猜想 (选填"一"、"二"或"一和二" 是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的 进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。
通过以上探究,小明同学真正理解了力臂是支点到 的距离。
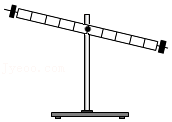
如图是探究杠杆平衡条件的几个实验情景:
(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆 (选填“达到”或“没有达到” 平衡状态,接下来调节杠杆两端的螺母,使杠杆处于 。
(2)如图乙, 点挂有2个质量均为 的钩码、为了让杠杆在水平位置平衡,应在 点挂 个质量均为 的钩码。
(3)如图丙,现给你一个量程为 的弹簧测力计,若干个 的钩码,钩码挂在 点处,现使用弹簧测力计和钩码使杠杆在水平位置平衡,则在 点处所挂钩码的最多个数为 个。
在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向 (选填“左”或“右” 调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在 处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在 处的钩码向右移动 格。
(3)若取掉乙图中挂在 处的钩码,改用弹簧测力计钩在 处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点 两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律” 。
在“探究杠杆平衡条件的实验”中:

(1)如图甲所示,杠杆左端下沉,则应将平衡螺母向 (选填“左”或“右” 调节,直到杠杆在水平位置平衡,在水平位置平衡的目的是便于测量 。
(2)如图乙所示,杠杆上的刻度均匀,在 点挂4个钩码,要使杠杆在水平位置平衡,应在 点挂 个相同的钩码;当杠杆平衡后,将 、 两点下方所挂的钩码同时朝远离支点 的方向各移动一小格,则杠杆的 (选填“左”或“右” 端将下沉。
(3)如图丙所示,在 点挂一定数量的钩码,用弹簧测力计在 点斜向上拉(与水平方向成 角)杠杆,使杠杆在水平位置平衡时,弹簧测力计的示数如图丙所示,已知每个钩码重 ,则在 点应挂 个钩码。
在“探究杠杆的平衡条件”实验中,每个钩码重力相等,杠杆刻度均匀。
(1)平衡时,应该让杠杆静止在 位置。
(2)小周同学所在实验小组完成某次操作后,实验现象如图1所示,他们记录的数据为:动力 ,动力臂 ,阻力 ,则阻力臂
(3)下列四个因素中,不会带来实验误差的是
.铁架台自身的重力足够大
.单个钩码的重力不完全相等
.悬挂钩码的绳套重力偏大
.杠杆与转轴之间的摩擦偏大
(4)小周同学所在实验小组在完成规定实验后,他们想进一步探究,如果杠杆受到 、 两个阻力,结果会怎样?通过实验,他们得到了如图2所示的结果。根据这个结果,可以初步得出,在这种情况下杠杆的平衡条件为: 。 、 、 的力臂分别用 、 、 表示)
如图所示,探究小组利用铁架台、带有刻度的杠杆、细线、若干相同钩码、弹簧测力计(单位: 等实验器材探究杠杆的平衡条件,在探究实验中
(1)在挂钩码前,小组发现杠杆左端高右端低(如图甲),应将杠杆两端的平衡螺母向 端调节(选填“左”或“右” ,使杠杆在水平位置平衡,这样做的目的是为了方便读出 ;
(2)接着小组在杠杆的两侧挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡(如图乙),这时杠杆两侧受到的作用力大小 (选填“大于”、“等于”或“小于” 各自钩码所受重力大小,若在 , 下方再增挂一个相同的钩码,则杠杆 端将下沉(选填“左”或“右” ;
(3)如图丙是已经调节平衡的杠杆,用弹簧测力计在杠杆 处竖直向上拉,在 处挂上适当的钩码,使杠杆在水平位置平衡,则弹簧测力计读数为 ,钩码总质量为 . 取
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






