为安全起见,妈妈为小明买了一块浮板辅助练习游泳.妈妈认为浮板能漂在水面上是因为它轻,小明认为妈妈的说法不对,科学的说法是因为浮板的密度比水的密度小.为验证自己的说法,小明设计了如下实验:

(1)找一根轻质均匀木棍、细绳(质量忽略不计)和一块标有“净重115g”字样的新肥皂,用如图所示的方法进行测量.测量时,使木棍在 位置平衡,记下A、B的位置,用刻度尺测出OA=10cm,OB﹣40cm,则浮板的质量为 kg.
(2)把浮板压入装满水的桶中刚好浸没,用塑料袋(质量忽略不计)收集溢出的水,用(1)所述方法测得溢出水的质量为4.6kg,则浮板的体积为 m3,密度为 kg/m3;用刻度尺测肥皂的长、宽、厚,算出肥皂的密度为1.33×l03kg/m3.浮板在水中漂浮而肥皂在水中下沉,说明小明的说法是正确的.小明用此浮板游泳时浮板受到的最大浮力为 N.
(3)根据这个实验结果,妈妈说原来用密度比水小的材料制成的物体才能漂浮在水上,这种说法 (选填“正确”或“不正确”).请举例说明 .
图甲所示为一种搬运建筑材料的机械装置,AB是个杠杆,O为支点,杠杆平衡时,B端受到的向下的拉力_______A端受到的向下拉力(选填“大于”、“小于”或“等于”);用于装载货物的小车自重为500N,若搬运2000N的货物,电动卷扬机拉钢丝绳的力F甲=1600N,该滑轮组的效率η甲=________;若用同样的滑轮按乙图组装,匀速提升相同的货物,电动卷扬机拉钢丝绳的力为F乙,乙滑轮组的效率为η乙,考虑实际情况,则F甲_____F乙,η甲_ _η乙(选填“>”、“<”或“=”)。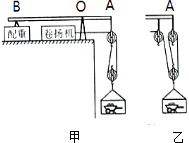
如图所示为某科学兴趣小组同学设计的汽车模型推力检测装置,它主要是由推力接受器F和压力杠杆OCD、压力传感器D和测量电路组成,其中OC:OD=1:5,显示汽车推力的仪表是由量程为3V的电压表改装而成,D点所受压力与滑动变阻器AP段电阻R的阻值变化关系如下表所示。若杠杆等推力检测装置的质量均忽略不计,滑动变阻器最大电阻R0为300Ω,电源输出电压恒为3.0V.
| 序号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| D点压力F/N |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
| 电阻R/Ω |
300 |
250 |
200 |
150 |
100 |
50 |
0 |

(1)当滑动变阻器AP电阻R的阻值为120Ω时,D点所受压力是 牛顿?
(2)为了把电压表改装成检测C点推力大小的仪表,请计算在电压表读数为2V的地方要标注压力几牛。
(3) 滑片P从A向B滑动的过程中电路消耗的电功率
A.一直变大 B.一直变小 C.一直不变 D.先变大后变小 E.先变小后变大
如图是液压汽车起重机从水中打捞重物的示意图.A 是动滑轮,B 是定滑轮,C 是卷扬机,D 是油缸,E是柱塞.作用在动滑轮上共三股钢丝绳,卷扬机转动使钢丝绳带动动滑轮上升提取重物,被打捞的重物体积V=0.5m3若在本次打捞前起重机对地面的压强p1=2.0×107Pa,当物体在水中匀速上升时起重机对地面的压强p2=2.375×107Pa,物体完全出水后起重机对地面的压强p3=2.5×107Pa.假设起重时柱塞沿竖直方向,物体出水前、后柱塞对吊臂的支撑力分别为N1和N2,N1与N2之比为19:24重物出水后上升的速度v=0.45m/s.吊臂、定滑轮、钢丝绳的重以及轮与绳的摩擦不计.(g取10N/kg)求:
(1)被打捞物体的重力;
(2)被打捞的物体浸没在水中上升时,滑轮组AB的机械效率;
(3)重物出水后,卷扬机牵引力的功率.
如图所示,一均匀杠杆A处挂2个钩码,B处挂1个钩码,杠杆恰好平衡,若每个钩码质量均为50g,在A、B两处再各加一个钩码,那么:( )
A.杠杆仍平衡
B.杠杆左边向下倾
C.杠杆右边向下倾
D.无法确定杠杆是否平衡
如图16所示,直径为36cm的半球形碗固定在水平面上,碗的端口水平。一根密度分布均匀、长度为47cm的光滑杆ABC搁置在半球碗上,碗的厚度不计,杆平衡时碗内部分AB段与碗外部分BC段的长度之比为( )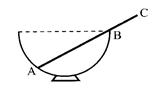
| A.38:9 | B.35:12 | C.32:15 | D.27:20 |
如图所示,密度分布均匀的圆柱形棒的一端悬挂一个小铁块并一起浸入水中。平衡时棒浮出水面的长度是浸入水中长度的n倍。若水的密度为ρ,则棒的密度为( )
A. |
B. |
C. |
D. |
如图一均匀木板长12m,重200N,距A端3m处有一固定转轴O,另一端B用细绳悬吊着,使木板成水平状态.若细绳能承受的最大拉力为200N,细绳与木板的夹角为30°,欲使一个体重为600N的人在板上能安全行走,此人在板上行走的范围是多大?(求出离O点左侧多少米到离O点右侧多少米)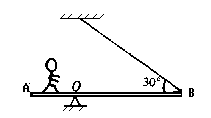
如图甲所示,将一根质量分布均匀的金属硬棒的一端通过铰链固定在O点,并能使金属棒绕O点在竖直面内自由转动。现通过一个“拉力—距离传感器”可对硬棒施加一个竖直向上的力,使硬棒在水平位置始终保持平衡。已知硬棒的长度是1.2m,“拉力—距离传感器”可自动记录拉力F的大小和拉力作用点到O点的距离x,并将记录的结果输送到计算机绘制出F与x的关系图线。若计算机上显示出的拉力F与距离x倒数的变化关系如图乙所示,则可知金属棒所受的重力为 N。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






