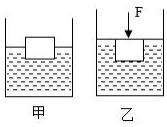
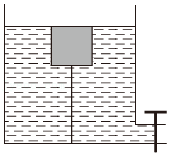
如图甲所示,小勇同学设计了一个汽车落水安全装置并进行了试验,在汽车的四个门板外侧分别安装一个气囊,气囊的触发由图乙所示电路中 、 间的电压来控制,压敏电阻 水平安装在汽车底部 处, 的阻值随其表面水的压力的变化如图丙所示。某次试验时:汽车入水前把 的滑片调到合适位置不动,闭合开关 ,电压表的示数为 ,再把汽车吊入足够高的长方体水池中缓慢下沉,直到 、 间的电压等于或大于 时,气囊就充气打开,使汽车漂浮在水中,试验装置相关参数如表所示。
| 电源电压 |
|
| 接触水的面积 |
|
| 长方体水池底面积 |
|

(1)求汽车入水前电路中的电流;
(2)当汽车漂浮时,测得水池的水位比汽车入水前上升了 (水未进入车内),求汽车受到的重力;
(3)求气囊充气打开时汽车 处浸入水中的深度。
小金把家里景观水池底部的鹅卵石取出清洗。他先将一个重为 的空桶漂浮在水面上,然后将池底的鹅卵石捞出放置在桶内,桶仍漂浮在水面。(不考虑捞出过程中带出的水,
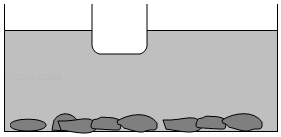
(1)空桶漂浮在水面时所受浮力大小。
(2)鹅卵石捞出放置在桶内时,水池水面高度与鹅卵石未捞出时相比会 (选填"上升"、"下降"或"不变" 。若此时桶排开水的体积为 ,求桶内鹅卵石的质量。
水平桌面上有一底面积为 的圆柱形薄壁容器,容器内装有一定质量的水。将底面积为 、高为 的柱形杯装满水后(杯子材料质地均匀),竖直放入水中,静止后容器中水的深度为 ,如图1所示;再将杯中的水全部倒入容器内,把空杯子竖直正立放入水中,待杯子自由静止后,杯底与容器底刚好接触,且杯子对容器底的压力为零,容器中水的深度为 ,如图2所示。已知水的密度为 。求:
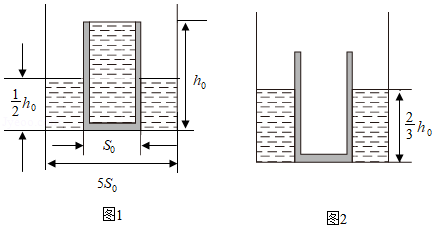
(1)空杯子的质量;
(2)该杯子材料的密度。
如图甲所示,某款国产水陆两用挖掘机的机械臂可绕O点转动,这辆挖掘机有两条履带,每条履带内均有1个由合金材料制成的空心浮箱,每个浮箱(可视为长方体)宽为1.5m,高为2m,合金密度为8.0×10 3kg/m 3。
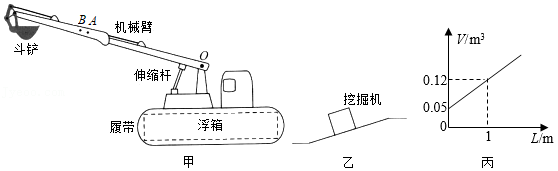
(1)某次测试中,质量为60kg的驾驶员驾驶挖掘机,从6m高的平台沿斜坡向下缓慢行驶20m,到达水平地面。
①请在图乙中画出挖掘机沿斜坡向下缓慢行驶时,挖掘机对斜坡的压力的示意图。
②在上述过程中,驾驶员的重力做了多少功?
(2)如图甲所示,开始时机械臂伸直且静止,O、A、B三点在同一直线上,OA=10m,AB=0.5m,机械臂和斗铲整体的重心在A点;机械臂控制斗铲装取质量为1t的沙石后,机械臂、斗铲和伸缩杆缓慢运动到如图甲所示的位置时静止,这时机械臂、斗铲和沙石整体的重心在B点。已知伸缩杆先后两次对机械臂的支持力(支持力垂直于机械臂)之比为5:7,则机械臂和斗铲的总质量是多少?
(3)已知制作每个浮箱时所用合金的体积V与浮箱长度L的关系如图丙所示,不计履带排开水的体积和驾驶员的质量,除2个完全相同的浮箱外,挖掘机其余部分的质量为33t。若挖掘机漂浮在水中,2个浮箱浸入水中的深度均不超过1.5m,则每个浮箱的长度至少是多少?
智能制造是第四次工业革命的核心技术,如图所示是为圆柱体涂抹防护油的智能装置。其外壳是敞口的长方体容器,距容器底面  处固定一支撑板
处固定一支撑板  ,
,  的中心有一小圆孔,圆柱体放在支撑板
的中心有一小圆孔,圆柱体放在支撑板  的正中央。长方体的左下角有注油口,防护油能够匀速注入长方体容器内部,当油的深度为
的正中央。长方体的左下角有注油口,防护油能够匀速注入长方体容器内部,当油的深度为  时,圆柱体刚好浮起离开支撑板
时,圆柱体刚好浮起离开支撑板  。随着液面升高,圆柱体竖直上浮,当油面上升到压力传感器时,停止注油,此时撑杆的
。随着液面升高,圆柱体竖直上浮,当油面上升到压力传感器时,停止注油,此时撑杆的  点对圆柱体有
点对圆柱体有  的竖直向下的压力。已知
的竖直向下的压力。已知  ,小圆孔面积
,圆柱体底面积
,小圆孔面积
,圆柱体底面积  ,圆柱体重
,圆柱体重  ,支撑板
,支撑板  的厚度不计,
的厚度不计,  取
取  。求:
。求:
(1)注油前,圆柱体对支撑板  的压强;
的压强;
(2)圆柱体刚好浮起离开支撑板  时浸入油中的体积;
时浸入油中的体积;
(3)圆柱体的高度。

如图,柱状容器下方装有一阀门,容器底面积为S=200cm 2,另有一边长为L 1=10cm的正方体木块,表面涂有很薄的一层蜡,防止木块吸水(蜡的质量可忽略),现将木块用细绳固定在容器底部,再往容器内倒入一定量的水,使木块上表面刚好与水面相平,绳长L 2=20cm,木块的密度为ρ 木=0.6×10 3kg/m 3。求:
(1)图中水对容器底的压强?
(2)若从阀门放出m 1=300g的水后,木块受到的浮力多大?
(3)若从阀门继续放出m 2=200g的水后,细绳的拉力多大?
如图甲所示,一轻质弹簧,其两端分别固定在容器底部和正方体物块上。已知物块的边长为10cm,弹簧没有发生形变时的长度为15cm,弹簧受到拉力作用后,伸长的长度ΔL与拉力F的关系如图乙所示。向容器中加水,直到物块上表面与水面相平,此时水深30cm。
(1)该物块受到水的浮力;
(2)该物块的密度;
(3)打开出水口,缓慢放水,当弹簧恢复原状时,关闭出水口。求放水前后水对容器底部压强的变化量。

如图甲所示,一边长为10cm的正方体物块漂浮于足够高、底面积为0.02m 2的盛有足量水的圆柱形容器中,有 体积露出水面,ρ 水=1.0×10 3kg/m 3,g取10N/kg。求:
(1)该物块受到的浮力;
(2)物块的密度。

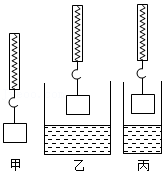
如图甲所示,用弹簧测力计拉着一正方体物块处于静止状态,弹簧测力计的示数F为20N,物块的边长为0.1m。A、B两容器分别装有等高的水和酒精,容器液面高度比物块边长高,如图乙、丙所示。现将物块先后缓慢浸入 A、B两容器的液体中,当物块刚好浸没时,A、B两容器中弹簧测力计示数分别为F1和F2,且F1:F2=5:6。(g取10N/kg,ρ水=1.0×103kg/m3)求:
(1)物块的质量;
(2)物块浸没在水中时所受浮力大小;
(3)酒精的密度;
(4)已知A容器底面积为B容器底面积的2.5倍。若物块浸没到水中后,水面升高了2cm,此时水对容器底部的压强为1.7×103Pa,则物块浸没到酒精中时,酒精对B容器底部的压强。
A、B、C是密度为ρ=4×103kg/m3的某种合金制成的三个实心球,A球质量为mA=80g,甲和乙是两个完全相同的木块,其质量为m甲=m乙=240g,若把B和C挂在杠杆的两边,平衡时如图1所示。若用细线把球和木块系住,在水中平衡时如图2所示,甲有一半体积露出水面,乙浸没水中。(g取10N/kg,ρ水=1.0×103kg/m3)求:
(1)B、C两球的体积之比;
(2)细线对A球的拉力大小;
(3)C球的质量。

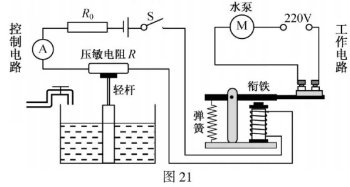
为节约用水,小华为农场的储水箱设计了一个自动抽水控制装置。如图21,水箱高为1 m,容积为
0.8 m3。在空水箱底部竖直放置一重5 N的长方体,长方体高为1m、底面积为0.02m2,上端通过绝缘轻杆
与控制电路的压敏电阻R接触,此时压敏电阻受到的压力为零。压敏电阻R的阻值随压力F的增大而减
小,部分数据如下表。控制电路电源电压U=12 V,定值电阻R0为保护电阻。当控制电路的电流I≥0.5 A
时,电磁铁将衔铁吸合,工作电路断开,水泵停止给储水箱抽水。
(1)若水泵的额定功率为440 W,正常工作时通过的电流是多少?
(2)要使储水箱装满水时水泵恰能自动停止工作,R0应为多少?
(3)从水箱顶部给空水箱注满水的过程中,水的重力所做的功是多少?
压力F/N |
180 |
185 |
190 |
195 |
200 |
压敏电阻R/Ω |
18 |
17 |
16 |
14 |
12 |
如图所示是一个水位监测仪的简化模型。杠杆 质量不计, 端悬挂着物体 , 端悬挂着物体 ,支点为 , 。物体 下面是一个压力传感器,物体 是一个质量分布均匀的实心圆柱体,放在水槽中,当水槽中无水时,物体 下端与水槽的底部恰好接触且压力为零,此时压力传感器的示数也为零。已知物体 的质量 ,高度 ,横截面积 取 , 。求:
(1)物体 的密度 ;
(2)物体 的质量 ;
(3)当压力传感器的示数 时,求水槽内水的深度 。

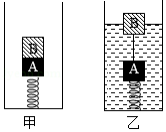
如图甲,水平桌面上的容器(厚度不计)底部固定一轻质弹簧(质量和受到的浮力均不计),弹簧上端连有正方体铁块 ,铁块 上表面中心与不吸水的正方体木块 下表面中心用长为 的轻质细绳拴接(细绳质量不计,长度不可伸长), 、 处于静止状态。已知铁块 和木块 的边长均为 , , ,容器底面积 、质量 。弹簧的弹力每变化 ,弹簧的形变量改变 。 , 取 求:
(1)图甲中,容器对水平桌面的压强;
(2)向容器中缓慢注水,直到细绳恰好伸直(细绳不受力),如图乙所示。弹簧对铁块 的支持力是多大?
(3)细绳恰好伸直后继续向容器内缓慢注水,直到木块刚好全部被水浸没,水面又升高了多少?
圆柱形容器置于水平地面(容器重忽略不计),容器的底面积为 ,内盛 深的水。现将一个底面积 、体积 均匀实心圆柱体放入其中。如图甲所示,物体漂浮在水面,其浸入水中的深度为 ;当再给物体施加一个竖直向下大小不变的力 以后,物体最终恰好浸没于水中静止,如图乙所示。 , 取 则:
(1)物体受到的重力是多少?
(2)物体浸没水中静止时容器对地面的压强是多少?
(3)从物体漂浮水面到浸没水中静止的过程中压力 做了多少功?

试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号