随着智能化的普及,机器人在人类的生活中扮演着重要的角色。在图书管理领域机器人可以辅助或替代管理员整理图书,表中所列数据是某新型图书智能管理机器人工作的部分技术参数。
| 参数 |
工作电压/V |
工作功率/W |
最大负重/N |
提升重物最大高度/m |
| 数据 |
48 |
40 |
200 |
0.6 |
现在智能机器人以最大负重将图书匀速竖直提升至最大高度,用时5s。则此次提升过程中:
(1)机器人提升图书速度是多少?
(2)机器人对书做功是多少?
(3)机器人的电动机工作电流是多少(结果保留两位小数)?电动机做功是多少?

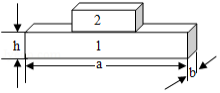
学校机器人兴趣小组进行"精准吊装"实验。7块长短不一的长方体木块均平放在水平地面上,机器人将木块按长度从大到小依次吊装并对称叠放。已知木块的密度相同,高度均为 ,宽度均为 ,不同序号木块的质量如下表,其中 , 取 。
(1)已知1号木块的长度 ,求未叠放时1号木块对地面的压强;
(2)如图,把2号木块吊装到1号木块的上面,求此过程克服木块重力所做的功;
(3)机器人完成全部吊装叠放用时 求整个过程克服木块重力做功的功率。
| 序号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| 质量 |
|
|
|
|
|
|
|
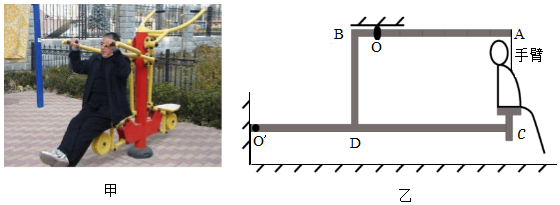
小红和爸爸散步时,看见小区内的一种健身器械坐拉器,如图甲所示,为了对它进行研究,小红简化了它的结构,画出了它的模型图,如图乙所示。她发现坐在坐拉器座椅上的人,用力向下拉动手柄A时,操作杆AB会绕着转轴O转动,连杆BD拉动杆OC绕转轴0转动,将座椅向上抬起,(g取10N/kg)
(1)小红让爸爸静止坐在坐拉器的座椅上,小红竖直向下拉动手柄,将爸爸抬起经过测量,手柄竖直向下移动30cm,座椅竖直升高9cm,用时5s
①小红利用坐拉器抬起爸爸时,以下说法正确的是
A.可以省功
B.一定定费力
C.爸爸越重,坐拉器的机械效率越高
D.爸爸被抬得越高,坐拉器的机械效率越高
②若爸爸的质量为60kg,利用坐拉器抬起爸爸的机械效率为90%,则小红抬起爸爸所做功的功率为多少?
(2)小红想通过图乙的模型,估算自己坐在坐拉器上抬起自己的拉力。图乙中OA:OB=6:1,O′C:O'D=2:1,此时AB杆处于水平位置,BD杆垂直于杆AB和O′C,BD杆对AB和OC杆的拉力均沿着BD,且大小相等。若手臂对手柄A的拉力方向和人的重力方向视作同一直线,物体间相互作用力的大小相等、方向相反,忽略坐拉器的自重、转动时的摩擦和座椅的尺度,若小红的质量为40kg,则此时小红让自己保持图乙的状态,需要对手柄A施加竖直向下的拉力为多大?
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






