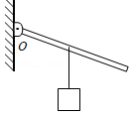
如图为某款擦窗机器人,它凭借其底部的真空泵在机身和玻璃之间形成低气压,牢牢地吸附在竖直玻璃上。请回答:
(1)当它静止在竖直玻璃上时,受到的摩擦力方向是 。
(2)擦窗机器人的擦试速度是4分钟 米 ,要擦完总面积为3米 的窗玻璃需要 分钟。
(3)工作时擦窗机器人对玻璃的压力为28牛,内外气压差达到800帕,求擦窗机器人与玻璃的接触面积至少为多少平方米?
(4)擦窗机器人的总质量为1.2千克,工作时的实际功率为80瓦,它在竖直向上擦窗过程中有 的电能用于克服重力做功。若窗户足够高,持续竖直向上擦窗20分钟,擦窗机器人可上升的最大高度为多少米?(取 牛 千克)

如图所示,通过滑轮组提升重 的物体,在 内物体提升了 ,不计机械自重及摩擦阻力, 取 ,则下列说法正确的是

A.绳的拉力是 B.拉力的功率是
C.拉力所做的功为 D.绳子自由端向下移动了
、 两物体叠放在水平桌面上,如图所示,当右端挂 的物体 时,物体 、 恰好能一起向右做匀速直线运动,此时 、 间的摩擦力为 ;若对物体 施加一个水平向左的力使物体 、 一起向左做匀速直线运动,绳与滑轮间的摩擦忽略不计,该力的大小为 。

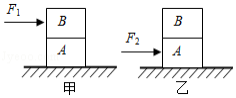
如图甲所示,完全相同的 、 两物块叠放在水平地面上,用 的水平力作用在 物块上, 一起做匀速直线运动,此时 物块所受的摩擦力为 ;若将 的水平力按如图乙所示作用在 物块上,它们仍一起做直线运动,则地面对 物块的摩擦力为 。
建筑工人利用如图所示装置,将质量为100千克的沙袋从地面匀速提到3米高的一楼楼面,用时30秒。已知动滑轮的质量为8千克,不计绳子重力和摩擦。
求:(1)拉力的大小。
(2)这段时间内人拉绳子做功的功率。

2017年3月22日是第二十五届“世界水日”,3月 日是第三届“中国水周”。水是生存之本,文明之源,生态之基。图中能正确描述水的各物理量之间关系的图象是
A. 水的重力与质量的关系B.
水的重力与质量的关系B. 水的密度与体积的关系
水的密度与体积的关系
C.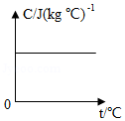 水的比热容与温度的关系D.
水的比热容与温度的关系D.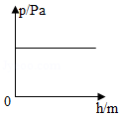 水产生的压强与深度的关系
水产生的压强与深度的关系
探究杠杆的平衡条件
猜想与假设】
猜想一:动力 动力臂 阻力 阻力臂
猜想二:动力 支点到动力作用点的距离 阻力 支点到阻力作用点的距离
【设计实验与进行实验】
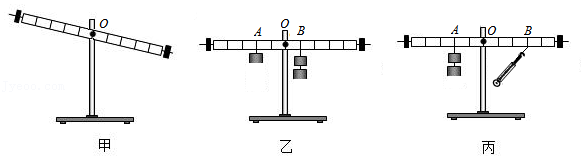
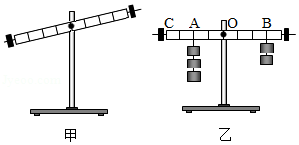
(1)如图甲所示,应将杠杆两端的螺母向 (选填"左"或"右" 调节,使杠杆在水平位置平衡。
(2)如图乙所示,小明同学挂上钩码并调节钩码的位置,使杠杆水平平衡,记录的数据如表。
(3)改变钩码的 和钩码的位置重复上述实验两次,记录的数据如表。
| 实验次数 |
动力 |
间距离 |
阻力 |
间距离 |
|
| 小明 |
1 |
1.0 |
5 |
0.5 |
10 |
| 2 |
1.5 |
10 |
1.0 |
15 |
|
| 3 |
1.0 |
10 |
2.0 |
5 |
|
| 小红和小明 |
4 |
0.8 |
15 |
1.0 |
10 |
| 5 |
1.4 |
15 |
1.0 |
10 |
|
【分析与论证】
根据小明同学的数据可验证猜想 (选填"一"、"二"或"一和二" 是正确的。而小红同学则认为小明同学每组数据中的力臂恰好都等于支点到力的作用点的距离,具有一定的特殊性,还应改变动力或阻力的 进行实验。
于是,小红同学协助小明同学按图丙方式进行实验,获得表中后两组数据。综合分析表中数据可验证猜想 是错误的。若要验证另一种猜想是否正确,必须添加的测量工具是 。
通过以上探究,小明同学真正理解了力臂是支点到 的距离。
在图中,画出杠杆平衡时施加在杠杆上的最小动力F 1的作用点和方向,并画出所挂重物的绳子对杠杆拉力的力臂L 2。
如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是

| A. |
"标"、"本"表示力,"权"、"重"表示力臂 |
| B. |
图中的 点为杠杆的支点 |
| C. |
"权"小于"重"时, 端一定上扬 |
| D. |
增大"重"时,应把"权"向 端移 |
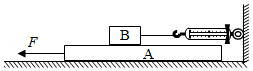
用如图所示装置测物体 的摩擦力。拉力 水平向左,不计弹簧测力计重,所用弹簧测力计已调零。完成下列问题:
(1)当 时,物体 保持静止,弹簧测力计示数为零,此时物体 受到的摩擦力为 ;
(2)当 时,物体 水平向左运动,弹簧测力计示数为 且保持不变,此时物体 受到的摩擦力方向为 。
杂技表演在我国具有悠久的历史。如图所示为杂技"顶竿"表演,甲站在地面上,肩上顶着一根重为  的竖直竹竿,重为
的竖直竹竿,重为  的乙沿竹竿匀速上爬
的乙沿竹竿匀速上爬  ,然后甲顶着乙在水平地面上缓慢直立行走
,然后甲顶着乙在水平地面上缓慢直立行走  。求在此过程中:
。求在此过程中:
(1)乙受到摩擦力的大小和方向;
(2)摩擦力对乙所做的功;
(3)甲对竿和乙做的功。

如图所示,以 为转轴的轻质杠杆 , ,物体 重 ,底面积为 ,在杠杆 端与物体的上端中点用一根轻质硬棒连接,当在 端用 的动力 竖直向上拉时,杠杆 在水平位置平衡,该杠杆为 杠杆(选填"省力"、"等臂"或"费力" ,此时物体 对水平地面的压强是 。

小明在“探究滑动摩擦力的大小与什么因素有关”的实验中,如图所示。
(1)根据 条件,当弹簧测力计沿水平方向拉着木块做 运动时,木块所受滑动摩擦力的大小等于拉力的大小,如图甲所示。
(2)小明在图甲实验中发现较难保持木块匀速运动,弹簧测力计示数不稳定。于是,他与同学们一起改进实验,如图乙所示,固定弹簧测力计,通过拉动长木板进行实验,实验记录如表,则木块所受的滑动摩擦力大小为 N。
实验次数 |
长木板运动情况 |
弹簧测力计示数/N |
1 |
匀速 |
2.0 |
2 |
由慢到快 |
2.0 |
3 |
由快到慢 |
2.0 |
(3)写出用图乙装置的一条优点: 。
工人师傅利用如图所示的两种方式,将重均为 的货物从图示位置向上缓慢提升一段距离。 、 始终沿竖直方向;图甲中 ,图乙中动滑轮重为 ,重物上升速度为 。不计杠杆重、绳重和摩擦,则下列说法正确的是

| A. |
甲乙两种方式都省一半的力 |
B. |
甲方式 由 逐渐变大 |
| C. |
乙方式机械效率约为 |
D. |
乙方式 的功率为 |
在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向 (选填“左”或“右” 调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在 处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在 处的钩码向右移动 格。
(3)若取掉乙图中挂在 处的钩码,改用弹簧测力计钩在 处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点 两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律” 。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






