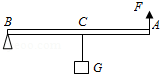
如图所示,在 的水平拉力 作用下,木板 在水平地面匀速向右运动的过程中,物体 相对于地面静止,此时弹簧测力计的示数为 ,则 所受滑动摩擦力方向水平向 (选填“左”或“右” , 受到地面的摩擦力大小为 。

小君同学在探究“影响滑动摩擦力大小的因素”实验中,做了如图所示的实验:
(1)用弹簧测力计拉着木块在水平方向做匀速直线运动,根据 的原理,可知摩擦力与拉力大小相等。
(2)小君分析甲和乙,发现 小于 ,说明滑动摩擦力的大小与接触面的 有关
(3)为了探究滑动摩擦力的大小与压力的大小有关,应比较 两图。
(4)小君在本次实验中运用的研究方法是 和转换法。

如图,两个滑轮组,提升一个重为17N的物体A,(每个滑轮重相同)使物体A在2s内拉升了20cm,拉力如图所示,下列说法正确的是( )

| A. |
甲中,绳端移动的距离为60cm |
| B. |
乙中,拉力的功率为1.7W |
| C. |
甲中,动滑轮由两根绳子吊着 |
| D. |
乙中,动滑轮的重力为2N |
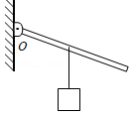
如图, 是能绕 点转动的轻质杠杆,在中点 处用绳子悬挂重为 的物体(不计绳重)。在 端施加竖直向上的拉力使杠杆在水平位置平衡,则拉力 .若保持拉力方向始终垂直于杠杆,将 端缓慢向上提升一小段距离,在提升的过程中,拉力 将 (选填“增大”、“减小”或“不变” 。
中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行。下列说法正确的是

| A. |
餐盘相对于机器人是运动的 |
| B. |
餐盘中食品受到平衡力作用 |
| C. |
机器人在水平地面匀速前行过程中机械能增大 |
| D. |
机器人在水平地面匀速前行时不受摩擦力的作用 |
如图,装满物品的拉杆式旅行箱总重  ,其重心在箱体的几何中心,图中
,其重心在箱体的几何中心,图中  与
与  等长。现将平放在水平地面上的该旅行箱的
等长。现将平放在水平地面上的该旅行箱的  端抬离地面,至少用力
端抬离地面,至少用力  ,拉杆越短,所需的力越 。
,拉杆越短,所需的力越 。

在图中,画出杠杆平衡时施加在杠杆上的最小动力F 1的作用点和方向,并画出所挂重物的绳子对杠杆拉力的力臂L 2。
如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是

| A. |
"标"、"本"表示力,"权"、"重"表示力臂 |
| B. |
图中的 点为杠杆的支点 |
| C. |
"权"小于"重"时, 端一定上扬 |
| D. |
增大"重"时,应把"权"向 端移 |
用如图所示装置测物体 的摩擦力。拉力 水平向左,不计弹簧测力计重,所用弹簧测力计已调零。完成下列问题:
(1)当 时,物体 保持静止,弹簧测力计示数为零,此时物体 受到的摩擦力为 ;
(2)当 时,物体 水平向左运动,弹簧测力计示数为 且保持不变,此时物体 受到的摩擦力方向为 。
杂技表演在我国具有悠久的历史。如图所示为杂技"顶竿"表演,甲站在地面上,肩上顶着一根重为  的竖直竹竿,重为
的竖直竹竿,重为  的乙沿竹竿匀速上爬
的乙沿竹竿匀速上爬  ,然后甲顶着乙在水平地面上缓慢直立行走
,然后甲顶着乙在水平地面上缓慢直立行走  。求在此过程中:
。求在此过程中:
(1)乙受到摩擦力的大小和方向;
(2)摩擦力对乙所做的功;
(3)甲对竿和乙做的功。

如图所示,以 为转轴的轻质杠杆 , ,物体 重 ,底面积为 ,在杠杆 端与物体的上端中点用一根轻质硬棒连接,当在 端用 的动力 竖直向上拉时,杠杆 在水平位置平衡,该杠杆为 杠杆(选填"省力"、"等臂"或"费力" ,此时物体 对水平地面的压强是 。

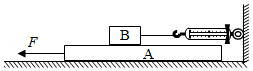
小明在“探究滑动摩擦力的大小与什么因素有关”的实验中,如图所示。
(1)根据 条件,当弹簧测力计沿水平方向拉着木块做 运动时,木块所受滑动摩擦力的大小等于拉力的大小,如图甲所示。
(2)小明在图甲实验中发现较难保持木块匀速运动,弹簧测力计示数不稳定。于是,他与同学们一起改进实验,如图乙所示,固定弹簧测力计,通过拉动长木板进行实验,实验记录如表,则木块所受的滑动摩擦力大小为 N。
实验次数 |
长木板运动情况 |
弹簧测力计示数/N |
1 |
匀速 |
2.0 |
2 |
由慢到快 |
2.0 |
3 |
由快到慢 |
2.0 |
(3)写出用图乙装置的一条优点: 。
工人师傅利用如图所示的两种方式,将重均为 的货物从图示位置向上缓慢提升一段距离。 、 始终沿竖直方向;图甲中 ,图乙中动滑轮重为 ,重物上升速度为 。不计杠杆重、绳重和摩擦,则下列说法正确的是

| A. |
甲乙两种方式都省一半的力 |
B. |
甲方式 由 逐渐变大 |
| C. |
乙方式机械效率约为 |
D. |
乙方式 的功率为 |
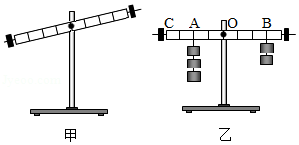
在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向 (选填“左”或“右” 调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在 处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在 处的钩码向右移动 格。
(3)若取掉乙图中挂在 处的钩码,改用弹簧测力计钩在 处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点 两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律” 。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






 B.
B.
 D.
D.
