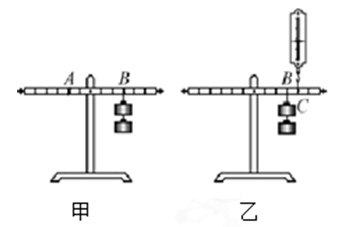
某同学想利用杠杆的平衡条件来测量刻度尺的质量。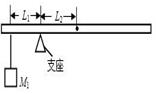
⑴将刻度尺平放在支座上,左右移动刻度尺,找出能够使刻度尺在水平位置保持平衡的支点位置,记下这个位置,它就是刻度尺的_______________;
⑵如图所示,将质量为M1的物体挂在刻度尺左边某一位置,向_____(选填“左” 或“右” )移动刻度尺,直到刻度尺能够在支座上重新保持水平平衡。记录物体悬挂点到支座的距离L1和刻度尺的____________到支座的距离L2;
⑶根据杠杆的平衡条件,可以计算出刻度尺的质量m=__________(用所给物理量表示)。
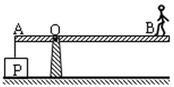
如图所示,质量不计的一块长木板AB可绕O点无摩擦转动,且OA=1m,OB=3m。在A端挂一个 N配重P,体重为400N的小明站在B点时,P对地面的压力为300N,当小明走到距O点________m处时,P对地面的压力刚好为860N。
小东想估测出某种油的密度ρ油,他手边的测量工具只有刻度尺.小东利用身边的器材设计出一个实验方案.首先找一根直硬棒,用细线系在O点吊起,硬棒在水平位置平衡,然后将已知密度为ρ的金属块B挂在硬棒左端C处,另外找一个重物A挂在硬棒右端,调节重物A的位置,使硬棒在水平位置平衡,此时重物挂在硬棒上的位置为E,如图所示.下面是小东测出ρ油的部分实验步骤,请你按照小东的实验思路,将实验步骤补充完整.
(1)用刻度尺测出OE的长度Lo;
(2)把金属块B浸没在油中,把重物A从E处移动到D处时,硬棒再次在水平位置平衡;
(3) ;
(4)利用上述测量出的物理量和题中的已知量计算ρ油的表达式为: .
如图所示,起重机将一箱设备沿竖直方向匀速吊装到施工高台上,设备重4000 N,施工台距离地面的高度为3m。动滑轮上每段钢绳的拉力是2500 N。(取g=10N/kg)
求:(1)起重机的质量为8t,工作时用支架将汽车的轮胎支离开地面。如果地面能承受的最大压强是7×104 Pa,支架与地面接触的总面积是多少?
(2)起重臂OA长12m,且与水平方向夹角为30°。支撑臂与起重臂垂直,作用点为B,且OB=4m,求支撑臂给起重臂的支持力(忽略起重臂自重,cos30°≈0.87)。
(3)起重机做功的机械效率。
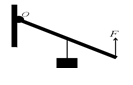
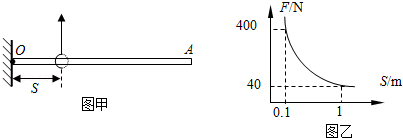
如图甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力﹣﹣位移传感器竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙所示.据图可知金属杆重( )
| A.5N | B.10N | C.20N | D.40N |
如图所示,用竖直向上的力F匀速拉动较长的杠杆,使重为10N的物体缓慢升高0.1m,拉力大小为8N,拉力移动的距离为0.25m。人做的有用功为_ J,该杠杆的机械效率为 ,此杠杆属于 (选填“省力”、“费力”或“等臂”)杠杆。
按要求完成下列作图:
(1)在如图甲所示中画出使轻质杠杆保持平衡的最小的力F的示意图及其力臂。
(2)如图乙所示,小明站在地面上,欲用滑轮组提升重物,请画出最合适的绕线方法。
(3)请在如图丙所示的虚线框内画出手电筒的电路图。
胶棉拖把的主要结构如图甲所示,使用时先将棉头浸泡于水中吸水,再拉动拉手,使之绕O点转动,胶棉夹将棉头中多余水分挤出后便可清理地板。请在图乙的示意中画出:(1)动力F1的力臂l1;(2)作用在B点的阻为F2。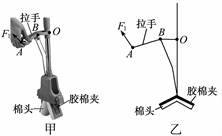
如图甲长2m的粗细和密度都均匀的光滑金属杆可绕O点转动,杆上有一光滑滑环,用竖直向上的测力计拉着滑环缓慢向右移动,使杆保持水平状态,测力计示数F与滑环离开O点的距离S的关系如图所示,则杆重 N;当滑环滑到图中A点时,金属杆是一个 杠杆(选填“省力”、“费力”或“等臂”).
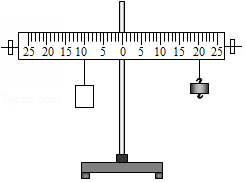
小梅在物理老师的指导下,利用一个重物、细线、若干钩码及杠杆来探究“杠杆平衡的条件”。
(1)实验前,为便于力臂的测量,她应通过调节杠杆两端的 使杠杆在 位置平衡。
(2)实验时,小梅决定先保持阻力 和阻力臂 不变,探究“杠杆平衡时,动力臂和动力之间的关系”。
于是,她用细线将重物固定到杠杆左侧某一位置处;然后在杠杆右侧用细线悬挂一个钩码,移动其悬挂的位置,使杠杆重新在水平位置平衡,如图所示,将动力 和动力臂 记录下来。
接下来,她要改变 并移动其悬挂的位置,多次重复前面的实验,并把相应的数据记录下来。
(3)小梅通过实验得到的实验数据如表1所示。
表一 保持阻力 和阻力臂 不变,探究杠杆平衡时动力臂和动力之间的关系
实验序号 |
动力 |
动力臂 |
1 |
0.5 |
0.20 |
2 |
1.0 |
0.10 |
3 |
1.5 |
0.07 |
4 |
2.0 |
0.05 |
5 |
2.5 |
0.04 |
分析表1中的数据,小梅得出的结论是:保持阻力和阻力臂不变,杠杆平衡时,动力臂 跟动力 成 关系。
(4)在前面实验的基础上,小梅进一步猜想:在更普遍的情况下,杠杆平衡时可能满足“动力 动力臂 阻力臂 阻力臂 ”
为了验证小梅的这个猜想,小丽通过实验得到的实验数据如表2所示
表2 探究杠杆平衡时,动力 、动力臂 和阻力 、阻力臂 之间的关系
实验次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
1 |
1.0 |
0.10 |
1.0 |
0.10 |
2 |
1.5 |
0.08 |
1.5 |
0.08 |
3 |
2.0 |
0.07 |
2.0 |
0.07 |
小梅认为,表2中小丽的实验数据缺乏普遍性,用来验证她的猜想不够充分,于是对小丽的实验和收集数据提出了具体的建议。
小梅的建议是:小丽还要在 的情况下进行实验和收集数据。
如图是一种自动测定油箱内油面高度的装置,R是滑动变阻器,它的金属滑片是杠杆的一端,且受定位挡板限制只能在电阻上滑动.当油面在A处时,滑动变阻器的滑片恰好在最下端;当油面在B处时,滑动变阻器的滑片在最上端.从油量表(由电流表改装而成)指针所指的刻度,可以知道油箱内油面的高度.现已知油的密度ρ=0.8×103kg/m3,电源电压是6V,定值电阻R′的阻值是12Ω.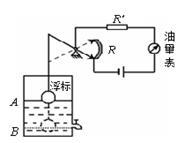
(1)若浮标有2×10-4m3的体积浸入油中,则油对它的浮力是多大?(g取10N/kg)提示:F浮=ρ油gV排
(2)当油面处在A处时,电流表示数为多少?
(3)已知电流增大时,电流表指针向右偏转,则_____.
| A.油面下降时,电流表指针向右偏转 |
| B.油量表零刻度线一定与电流表原零刻度线相重合 |
| C.油量表的刻度值从左往右是逐渐增大的 |
| D.油箱内的油越少,流过电流表的电流越大 |
如图所示,平直的薄板AB长1m,重力忽略不计,B端用细绳悬于天花板上,绳与水平方向夹角为30°,薄板始终保持水平.一辆重20N、功率为1W的电动小车,从A端以0.2m/s的速度向右匀速行驶4s,细绳恰好被拉断,求: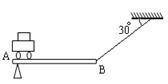
(1)小车行驶过程中牵引力做的功;
(2)小车运动时受到的阻力;
(3)细绳恰好被拉断时能承受的最大拉力.
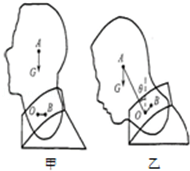
“低头族”长时间低头看手机,会引起颈部肌肉损伤.当头颅为竖直状态时,颈部肌肉的拉力为零,当头颅低下时,颈部肌肉会产生一定的拉力.为了研究颈部肌肉的拉力与低头角度大小的关系,我们可以建立一个头颅模型来模拟实验,如图甲所示.把人的颈椎简化成一个支点O,用1kg的头颅模型在重力作用下绕着这个支点O转动,A点为头颅模型的重心,B点为肌肉拉力作用点.将细线的一端固定在B点,用弹簧测力计拉着细线模拟测量肌肉的拉力,头颅模型在转动过程中,细线拉力的方向始终垂直于OB,如图乙所示.让头颅模型从竖直状态开始转动,通过实验记录出低头角度θ及细线拉力F的数据.如表:
| 低头角度θ/° |
0 |
15 |
30 |
45 |
60 |
| 细线拉力F/N |
0 |
7.3 |
14.0 |
20.2 |
25.0 |
(1)头颅模型质量为1kg,当低头角度为60°时,颈部肌肉实际承受的拉力是 N;如果真实头颅质量为8kg,当低头角度为60°时,颈部肌肉实际承受的拉力是 N.
(2)请解释:为什么低头角度越大,颈部肌肉的拉力会越大?答 .
(3)请你就预防和延缓颈椎损伤提出一个合理化的建议: .
探究杠杆的平衡条件
【提出问题】如图所示,是一种常见的杆秤.此时处于水平位置平衡.
发现一:小明在左侧挂钩上增加物体,可观察到提纽左侧下沉.他认为改变杠杆的水平平衡可以通过改变作用在杠杆上的 来实现;
发现二;接着小新移动秤砣使其恢复水平位置平衡。说明通过改变 的长短也可以改变杠杆的平衡.
那么,杠杆在满足什么条件时才平衡呢?
【制定计划与设计实验】
实验前,轻质杠杆处于如图所示的状态,使用时,首先应将杠杆的平衡螺母向 (选填“左”或“右”)调节,使杠杆处于水平位置平衡,这样做的好处是 
【实验结论】
如图所示,他们进行了三次实验,对实验数据进行分析,得出杠杆的平衡条件是 ,
【拓展应用】如图所示,是用手托起重物的示意图,图中前臂可以看作是一个 杠杆(选填“省力”、“费力”或“等臂”),此杠杆的支点是图中的 点,假如托起6N的重物,请你根据图21所示,估算出手臂要用的动力大约是 N
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号