小刚和小明等同学一起做“探究杠杆的平衡条件”的实验。
(1)小刚将杠杆中点置于支架上,当杠杆静止时,发现杠杆的左端上翘,此时,他应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)如图所示,若每个钩码重0.5N,且杠杆上每格相等,小明在杠杆左端图示位置处挂上3个钩码,为使杠杆在水平位置平衡,他在图中A处施加一个方向向上的力F1,此力大小至少为 N。
(3)若撤去力F1,改在杠杆右端B处施加一个方向向下的力F2(如图所示),仍使杠杆平衡。请在图乙中画出力F2的力臂。
如图所示,一处于水平平衡状态的杠杆,杠杆上所标刻度每小格长为3cm.某同学在研究杠杆平衡实验时,在杠杆上的A点挂四个钩码,每个重为1N,用弹簧测力计在B点竖直向上拉杠杆,使杠杆水平平衡,此时弹簧测力计拉力的力臂为 cm,弹簧测力计的示数为 N.
如图所示的四种工具在使用过程中,属于费力杠杆的是( )
A. 食品夹 食品夹 |
B. 瓶盖起子 瓶盖起子 |
C. 钳子 钳子 |
D. 核桃夹 核桃夹 |
如图,重为50N的物体挂在杠杆B点,OB=O.4m,OA=1m,在A端施加竖直向上的拉力F,当F= N(杠杆自重忽略不计)时,杠杆在水平位置平衡;测量质量的工具托盘天平也是杠杆,它属于 (选填“省力”、“费力”或“等臂”)杠杆。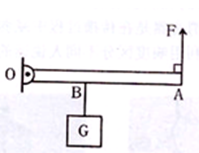
小柯在测量某铁块的重力时,发现铁块的重力超出了弹簧测力计的量程,一时又找不到其他测量工具,为了测出该铁块的重力,他找来木棒、细铁丝等物品进行如下改进: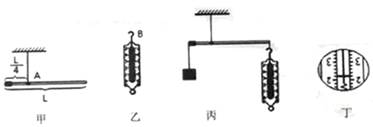
步骤一:将细线系在木棒的A位置,在木棒的左端绕上适量的细铁丝,使木棒处于水平位置平衡,如图甲。
步骤二:用手指勾住弹簧测力计的B处,对弹簧测力计进行调零,如图乙。
步骤三:在木棒左端挂上铁块,右端用弹簧测力计竖直向下拉,如图丙
(1)步骤一中,“在木棒的左端绕上适量的细铁丝,使木棒处于水平位置平衡”是为了防止 测量结果的影响。
(2)步骤三中,当木棒处于水平位置平衡时,弹簧测力如图丁所示,则该铁块的重力是 N
如图所示,一根质量分布均匀的木棒,质量为m,长度为L,竖直悬挂在转轴O处。在木棒最下端用一方向始终水平向右的拉力F缓慢将木棒拉动到竖直方向夹角为θ的位置(转轴处摩擦不计)。问: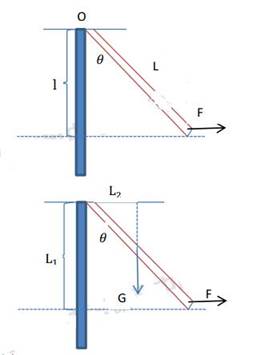
(1)在答题纸上画出θ=60°时拉力F的力臂L1,并计算力臂的大小。
(2)木棒的重力作用点在其长度二分之一处,随拉开角度θ的增加,拉力F将如何变化?
并推导拉力F与角度θ的关系式。
如图所示是一种新型圆规,它一脚的末端装有吸盘,使用时利用 的作用可将其固定在黑板上。作图时,转动手柄便可在黑板上画出漂亮的圆,圆规在这这使用过程中相当于简单机械中的 。(选填“省力杠杆”或“费力杠杆”)
在“探究杠杆的平衡条件”实验中: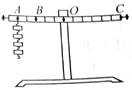
(1)实验前,发现杠杆左端偏高,应向 端调节平衡螺母,使杠杆在水平位置平衡。
(2)如图所示,把钩码挂在杠杆左侧A点,为使OB成为力臂,应在B点沿着 的方向拉动弹簧测力计,使杠杆在水平位置平衡。
(3)若每个钩码重为0.5N,将A点的钩码全部移到B点,弹簧测力计作用在C点,为使杠杆在水平位置平衡,所加最小力为 N。
如图是自行车手闸示意图,手闸是一个简单机械,这种简单机械的名称是 ,当图中手对车闸的作用力F=10N时,刹车拉线受到力的大小为 N。
在科学实验时,为了减小误差或寻找普遍规律,经常需要进行多次实验。
①在“测量物体的长度”时,进行多次测量
②在“探究杠杆的平衡条件”时,改变动力(臂)和阻力(臂),多次实验
③在“探究电流与电压、电阻的关系”时,多次调节滑动变阻器进行实验
④在“测量定值电阻阻值的实验”中,多次调节滑动变阻器,测出多组对应的电压值和电流值
上述实验中属于寻找普遍规律的是( )
| A.①② |
| B.①③ |
| C.②③ |
| D.②④ |
图中OA为轻质杠杆,可绕O点转动,在点B处用细绳悬挂一重物,在A端施加动力F1,使杠杆在水平位置平衡。请画出杠杆受到的阻力F2及动力臂l1.。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号










