如图甲所示,滑轮组通过轻质弹簧悬挂于 点,下端悬挂一柱形物体并浸没于装有水的柱形容器中,物体上表面恰好与水平面相平,绳子 端固定,忽略滑轮重,绳重及摩擦。已知容器底面积为 ,水深 ,物体的底面积为 ,高为 ,重为 , , 取 。
(1)求水对容器底的压强;
(2)求水对物体的浮力大小;
(3)求弹簧所受拉力的大小;
(4)若要使柱形物体有 的长度露出水面,需打开阀门 放出多少 的水?(题中弹簧所受拉力 与其伸长量△ 的关系如图乙所示)

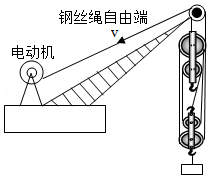
如图所示是打捞物体的模拟装置。现电动机带动钢丝绳自由端以 的速度匀速拉动滑轮组,经过 将体积为 的物体由海底提升到海面,物体离开海面后钢丝绳自由端的速度变为 ,此时电动机的输出功率比物体在海水中时增大了 (不计物体的高度、绳重和摩擦, , 取 , 取 。求:
(1)物体浸没在海水中受到的浮力;
(2)物体在海底时的深度;
(3)物体在海底时受到海水的压强;
(4)物体在海面下匀速上升过程中,该滑轮组的机械效率(不计动滑轮体积)
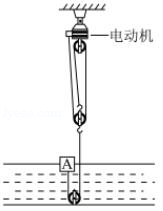
如图所示,实心物体 漂浮在水面上,现利用电动机通过滑轮组拉动 ,使 向下运动。已知 的体积为 ,密度为 .动滑轮重为 ,电动机工作时拉绳子的功率为 且保持不变,不计绳重、摩擦和水的阻力,求:
(1) 的重力;
(2) 浸没在水中受到的浮力;
(3) 向下运动的最小速度;
(4) 向下运动过程中,滑轮组机械效率的最大值。
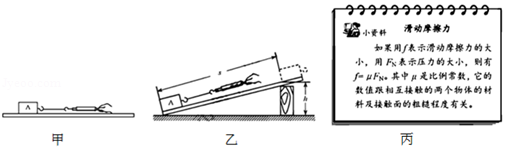
某同学在研究滑动摩擦力时,先后做了如下两次实验:
实验一:将重为 的物块 放在一水平溥木板上,用弹簧测力计沿水平方向拉动物块,使它在木板上匀速运动,如图甲所示。读出弹簧测力计示数为 ;
实验二:再将上述木板一端垫起,构成一个长为 、高为 的斜面;然后用弹簧测力计沿斜面拉动物块 ,使它在斜面上匀速向上运动,如图乙所示。读出弹簧测力计的示数为 ,请你结合实验过程,运用所学知识解答如下问题(阅读图丙)
(1)画出物块 在斜面上运动时对斜面的压力 的示意图;
(2)求出物块 对斜面的压力 。
如图所示,一轻质杠杆 .长 ,支点在它中点 .将重分别为 和 的正方体 、 用细绳系于杠杆的 点和 点,已知 , 的边长 。

(1)在图中画出 受力的示意图。
(2)求此时 对地面的压强。
(3)若沿竖直方向将 左右两边各切去厚度为 的部分,然后将 点处系着 的细绳向右移动 时, 对地面的压强减小了 ,求 为多少。
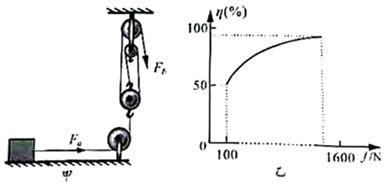
小熊在课外实践活动中,用如图甲所示的滑轮组匀速拉动放在树下一水平面上的不同物体,物体受到的摩擦力从 开始逐渐增加,每次物体被拉动的距离均为 。根据测量结果画出了该滑轮组机械效率与物体受到摩擦力大小变化的关系图象,如图乙所示。若不计绳重和绳与滑轮间的摩擦,求:
(1)由图乙可知,当物体受到的摩擦力为 时,滑轮组机械效率是多大?
(2)当滑轮组的机械效率为 ,物体以 的速度匀速运动时,该滑轮组的有用功率是多大?
(3)当物体与地面的摩擦力为 时,体重为 的小熊竖直向下拉绳,还能用此滑轮组拉动物体吗?用计算结果说明。
现有一质地均匀密度为 的实心圆柱体,底面积为 、高为 ,将其中间挖去底面积为 的小圆柱体,使其成为空心管,如图1所示。先用硬塑料片将空心管底端管口密封(硬塑料片的体积和质量均不计),再将其底端向下竖直放在底面积为 的柱形平底容器底部,如图2所示。然后沿容器内壁缓慢注入密度为 的液体,在注入液体的过程中空心管始终保持竖直状态。
(1)当注入一定量的液体时,空心管对容器底的压力刚好为零,且空心管尚有部分露在液面外,求此时容器中液体的深度。
(2)去掉塑料片后,空心管仍竖直立在容器底部,管外液体可以进入管内,继续向容器中注入该液体。若使空心管对容器底的压力最小,注入液体的总质量最小是多少?

汽车超载是当前发生交通事故的重要原因之一。全国各地设置了许多超载监测站加强监管。如图所示,一辆两轴货车正在水平地面上设置的某种电子地磅秤上称重。先让货车前轮单独开上电子地磅秤,其读数为 ;前轮驶离电子地磅秤,再让后轮单独开上电子地磅秤,其读数为 。国家规定两轴货车限载车货总重 ,请你通过计算分析该货车是否超载。

如图甲所示,不吸水的长方体物块放在底部水平的容器中,物块的质量为 ,物块的底面积为 ,物块与容器底部用一根质量、体积均忽略不计的细绳相连,当往容器中缓慢注水至如图乙所示位置,停止注水,此时,物块上表面距水面 ,绳子竖直拉直,物块水平静止,绳子的拉力为 .已知 , 。求:
(1)物块的重力;
(2)物块的密度;
(3)注水过程中,绳子刚好竖直拉直时到图乙所示位置时,水对物块下表面压强的变化范围。

某物理研究小组设计了一个压力报警装置,工作原理如图甲所示。
为水平杠杆,
长
,
为支点,
;已知报警器
的阻值恒为
,压力传感器
固定放置,压力传感器受到的压力
与
的阻值变化的关系如图乙所示。当托盘空载时,闭合开关
,电压表的示数为
:当托盘所受的压力增大,电压表的示数达到
时,报警器
开始发出报警信号。托盘、压杆和杠杆的质量均忽略不计,电压表的量程为
.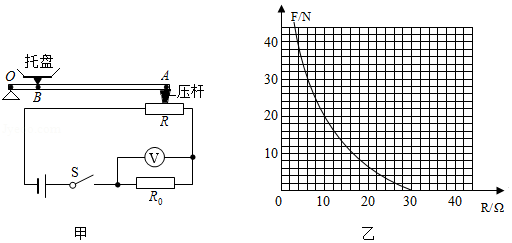
求:
(1)电源电压;
(2)当报警器开始报警时,压力传感器受到的压力;
(3)当托盘受到的压力为 时,报警器是否报警;
(4)当电路输出的电功率与电路在安全状态下输出的最大电功率的比值为 时,托盘受到的压力。
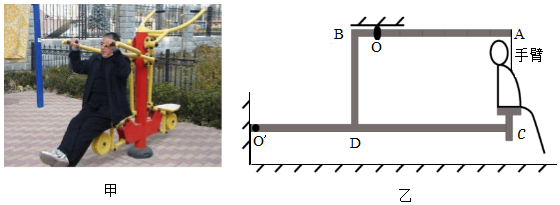
小红和爸爸散步时,看见小区内的一种健身器械坐拉器,如图甲所示,为了对它进行研究,小红简化了它的结构,画出了它的模型图,如图乙所示。她发现坐在坐拉器座椅上的人,用力向下拉动手柄A时,操作杆AB会绕着转轴O转动,连杆BD拉动杆OC绕转轴0转动,将座椅向上抬起,(g取10N/kg)
(1)小红让爸爸静止坐在坐拉器的座椅上,小红竖直向下拉动手柄,将爸爸抬起经过测量,手柄竖直向下移动30cm,座椅竖直升高9cm,用时5s
①小红利用坐拉器抬起爸爸时,以下说法正确的是
A.可以省功
B.一定定费力
C.爸爸越重,坐拉器的机械效率越高
D.爸爸被抬得越高,坐拉器的机械效率越高
②若爸爸的质量为60kg,利用坐拉器抬起爸爸的机械效率为90%,则小红抬起爸爸所做功的功率为多少?
(2)小红想通过图乙的模型,估算自己坐在坐拉器上抬起自己的拉力。图乙中OA:OB=6:1,O′C:O'D=2:1,此时AB杆处于水平位置,BD杆垂直于杆AB和O′C,BD杆对AB和OC杆的拉力均沿着BD,且大小相等。若手臂对手柄A的拉力方向和人的重力方向视作同一直线,物体间相互作用力的大小相等、方向相反,忽略坐拉器的自重、转动时的摩擦和座椅的尺度,若小红的质量为40kg,则此时小红让自己保持图乙的状态,需要对手柄A施加竖直向下的拉力为多大?
如图为某蓄水池的模拟原理图, 池中的液面高度 ,池底有一出水口,出水口下的活塞通过连杆与杠杆 相连,活塞横截面积
.杠杆可绕 端上下转动,另一端有一中空且内有配重的圆柱形浮子浸入 池中, 是杠杆总长的 ,杠杆对浮子的作用力沿竖直方向。原设计当杠杆水平时,浮子浸入水深 ,活塞恰能堵住出水口。但在使用时发现,活塞离出水口尚有一小段距离时,浮子便不再上浮,此时浮子浸入水深 。若将浮子的配重减少,△ ,杠杆变为水平且活塞恰能堵住出水口。出水口面积略小于 ,计算时可认为相等,水的密度 , 。(活塞与连杆自重、杠杆自重及所受浮力、两池中液面高度的变化均不计。
求:
(1) 池池底水深为 处所受压强;
(2)活塞恰能堵住出水口时连杆对杠杆压力的大小;
(3) 池中浮子的横截面积 。
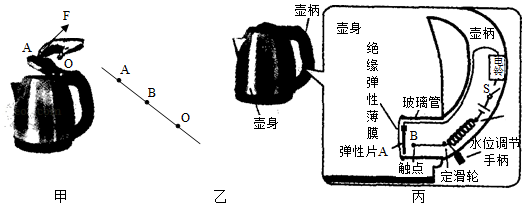
小明的奶奶在家中用电水壶接水时,由于壶口较小,壶盖挡视线,很难观察到壶中水位的变化,结果水从壶中溢出洒到地上,小明一边帮奶奶擦地上的水,一边想:如果给水壶安装一个报警器,当水位达到一定高度时,报警器发出声音,提示水接好了,这样就方便多了。
(1)小明找来家中的电水壶,如图甲所示,观察电水壶的外观并研究它的使用过程,发现其中涉及一些物理知识,下列说法正确的是 (填字母)
A.向壶中注水时,听到的声音是通过空气传入到人耳的
B.金属壶身“反光”是发生了漫反射
C.烧水时壶嘴冒出的“白气”是液化现象
D.注水后壶底看起来变浅了,是光的折射现象
(2)当用力F打开壶盖时,壶盖相当于一个杠杆,请你在图乙中画出壶盖所受重力G的示意图和重力的力臂I(O为支点,B为壶盖的重心,A为F的作用点)。
(3)小明认真思考后,结合学过的力学和电学知识,设计了如图丙所示的报警电路,以下是小明的设计方案,请将其补充完整。
①报警器的水中部分是一个玻璃管,它的一端被绝缘弹性薄膜封闭,报警电路的一部分在玻璃管内,其中弹性片A靠近薄膜,使用时,闭合报警电路开关S,向壶内注水,随着壶中水位的升高、水对薄膜的压力逐渐 (填“变大”或“变小”),弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水。
②为了满足不同的注水高度要求,该电水壶的报警水位高度可以调节,水位调节手柄的一端固定在报警电路中长度可调的弹簧上,水位调节手柄可以移动,并能固定在不同挡位的卡槽中,当水位调节手柄移动时,触电B可以随着它左右移动,请分析该报警电路并说明,想要使报警器在更低的水位报警吗,可以调节水位调节手柄,使触点B
向 (填“左”或“右”)移动。
图甲是某型号的抽水马桶水箱进水控制装置的示意图,浮子是有上底无下底的圆柱形容器,中间有圆柱形的孔(图乙是浮子的放大示意图),壁的厚度忽略不计,浮子通过孔套在直杆上,并与调节螺母紧密相连,手动上下移动调节螺母,可以使浮子的位置随之上下移动,轻质细杆 可绕 点旋转, 端与直杆底端相连, 端装有塞子,当水箱的进水孔进水,水面接触到浮子下端后,浮子内的空气开始被封闭压缩,随着水位继续上升,浮子上升带动直杆向上运动,当水位上升到一定高度, 杆处于水平位置时,塞子压住进水孔,进水孔停止进水。

(1)为测出浮子上底面的面积,给你刻度尺、量筒和水,请完成实验
①将浮子倒置后,用刻度尺测出浮子内的深度
②将浮子装满水, ;
③浮子上底面的面积表达式: (用所测量物理量的符号表示)
(2)若浮子上升的过程中内部被封闭的空气不泄露,用上述方法测得的浮子上底面的面积为 ,外界大气压为 ,浮子、直杆、细杆 、塞子的重力及所受浮力均不计,忽略所有摩擦,当进水孔停止进水时,浮子内的气体压强为外界大气压强的1.2倍,求此时:
①浮子上底面所受内外气体压力差为多大?
② 长 , 长 ,塞子受到水的压力为多大?
(3)科学研究表明,一定质量的气体,在温度不变时,其压强与体积成反比,当进水孔的水压过大时,塞子被冲开,水箱内的水位超过一定高度,会使水溢出,若通过移动调节螺母的方法保证马桶正常使用,应如何移动调节螺母。
嫦娥四号月背之旅
月球是地球的天然卫星,月球绕地球公转的周期与自转周期相同,所以月球总是同一面背对地球,这一面被称为月球背面。物体在月球上的重力只有地球上的 。
月球背面与地球间的通讯是一个难题,为解决该问题,我国在2018年5月成功发射了人类史上首个月球信号中继卫星“鹊桥”(如图甲所示)。2018年12月8日,我国又将嫦娥四号探测器送入太空。嫦娥四号经历地月转移、近月制动、环月飞行和落月过程,最终在月球背面软着陆,成为人类史上首个着陆于月球背面的无人探测器。为避免嫦娥四号在着陆瞬间“闪着腰”,工作人员给它研制了4条强有力的“腿”,让它既能平稳着陆,又能有效“吸收”着陆时产生的冲击力,防止它携带的设备被震坏。在嫦娥四号的“腿”上,还“长着”脸盆一样的圆形“大脚掌”(如图乙所示)。“大脚掌”中央装有一个形如足弓的金属构件,可以有效分散冲击力。
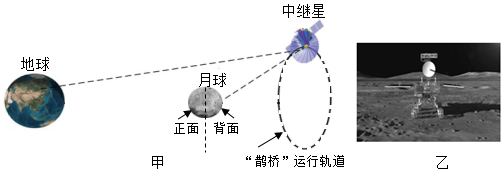
嫦娥四号由着陆器与巡视器(即月球车,又称“玉兔二号”)组成,2019年1月3日,巡视器与着陆器成功分离,“玉兔二号”利用其底部6个带齿纹的轮子有效增大了与月面间摩擦,顺利在月背表面行驶。“玉兔二号”配有全景相机、红外成像光谱仪、测月雷达等科学探测仪器,总质量仅 ,是世界上质量最小的月球车。
阅读短文,回答问题:
(1)“鹊桥”中继星在轨道上运行时,受到的力 (选填“是”或“不是”)平衡力;
(2)嫦娥四号探测器“腿”上的圆形“大脚掌”可 (选填“减小”或“增大”)对月面的压强;
(3)为增大与月面间的摩擦,“玉兔二号”采用的装置是 ;
(4)若“玉兔二号”每个轮子触月面积为 ,则“玉兔二号”对水平月面的压强为 (地球上 取 。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号






