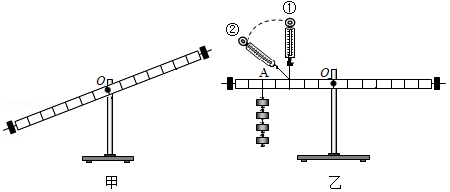
滑轮是工农业生产中常用的一种简单机械.甲同学用定滑轮进行了如图所示的算个实验.
(1)甲同学研究的问题是 .
(2)研究该问题时,弹簧测力计的操作方法可以是 .(填序号)
①拉着重物保持静止; ②匀速向下拉动重物; ③随意拉动重物.
如图所示是某同学做俯卧撑时的示意图,他的质量为56kg。身体可视为杠杆,O点为支点.A点为其身体重心。每次俯卧撑他肩膀向上撑起40cm。(4分 g=10N/kg )(1) 该同学所受重力是多少?(2)若0B=1.0m,BC=0.4m,求地面对双手支持力的大小.(3)若他一分钟可完成30个俯卧撑,其功率多大?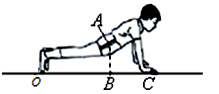
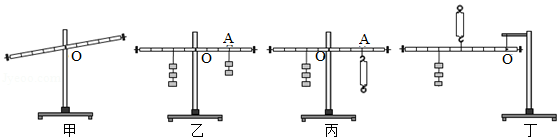
小明同学探究“杠杆的平衡条件”:
(1)调节杠杆水平平衡后,小明进行的三次实验如图21乙所示.根据实验,他得出杠杆的平衡条件为“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,你认为这个结论是________(选填“正确”或“错误”)的,实验过程中使杠杆水平平衡的目的是_________________________;
(2)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图丙所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图乙可判断GA_______GB(选填“>”、“=”或“<”).
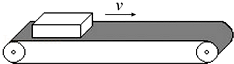
网上购物带动了快递业的发展,包裹的分捡常需借助传送带。
(1)传送带的表面往往比较粗糙,其目的是 。
(2)包裹与传送带一起做水平匀速直线运动时,包裹共受到 个力的作用。
(3)已知长方体包裹长50厘米,宽30厘米,高10厘米,质量为15千克。如果包裹平放在水平传送带上(如图),则对传送带的压强为多少帕? 取10牛 千克)
在"探究杠杆平衡条件"的实验中:
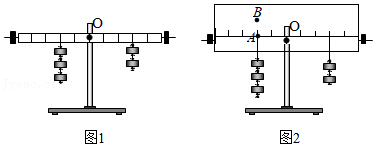
(1)为方便测量力臂,实验前应先调节杠杆两端的平衡螺母,使之在 位置平衡。
(2)如图1,此时杠杆处于平衡状态,如果在杠杆两端各挂一个相同的钩码,杠杆将 (选填"保持平衡""顺时针转动"或"逆时针转动" 。
(3)如图2是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到 点正上方的 点,力臂是线段 (选填" "" "或" " ,此时杠杆 (选填"仍能"或"不能" 保持平衡。
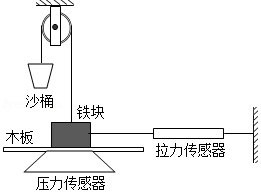
在学习影响滑动摩擦力大小的因素后,小柯还是认为:重力越大,滑动摩擦力越大。于是张老师用如图装置与他一起实验。
步骤一:将铁块放在木板上,往砂桶中加入一定量细沙,使压力传感器的示数为5.00牛,水平向左拉动木板,读出拉力传感器的示数并记录。
步骤二:换用质量不同、粗糙程度和底面积都相同的铁块,重复步骤一,记录结果如下表:
实验次数 |
质量不同的铁块 |
压力传感器示数(牛 |
拉力传感器示数(牛 |
1 |
小 |
5.00 |
2.10 |
2 |
中 |
5.00 |
2.11 |
3 |
大 |
5.00 |
2.11 |
请回答下列问题:
(1)第1次实验中铁块受到的摩擦力为 牛;
(2)实验中能否用钩码代替细沙?并说明理由;
(3)通过实验得出的结论是 ;
(4)小柯认为:该实验中压力传感器的上表面要尽量光滑,否则会使拉力传感器的读数偏大,你认为他的说法是否合理,为什么? 。
在探究“杠杆平衡条件”的实验中,采用了如图甲所示的实验装置:
(1)实验前,小明同学发现实验装置处于如图甲所示的状态,使用时,首先应将杠杆两端的平衡螺母向 (选填“左”或“右” 调节,使杠杆在水平位置平衡,这样做的好处是 ;
动力 |
动力臂 |
阻力 |
阻力臂 |
2 |
5 |
5 |
2 |
3 |
6 |
6 |
3 |
4 |
2 |
2 |
4 |
3 |
4 |
2 |
6 |
3 |
6 |
9 |
2 |
4 |
4 |
2 |
8 |
(2)一实验小组在正确操作过程中,得出的实验数据如上表。小明同学分析实验数据后认为杠杆平衡的条件是:动力 动力臂 阻力 阻力臂;小华同学分析实验数据后认为杠杆平衡的条件是:动力 动力臂 阻力 阻力臂。两个同学都认为自己是对的,对方是错误的。那么你认为他们中正确的应该是 同学。原因是 ;
(3)把图乙中 点的钩码取下,在 点用弹簧测力计施加一个竖直向下的拉力 时,杠杆仍能在水平位置平衡,如图丙所示。当拉力 向左倾斜时,要保持杠杆仍在水平位置平衡,则拉力 将 (选填“变大”、“变小”或“不变” ;
(4)小红同学采用了图丁所示的装置进行探究,发现当杠杆水平平衡时,与其他同学得出的正确的杠杆平衡条件不相符,其可能的原因是 。
某同学想利用杠杆的平衡条件来测量刻度尺的质量.

⑴ 将刻度尺平放在支座上,左右移动刻度尺,找出能够使刻度尺在水平位置保持平衡的支点位置,记下这个位置,它就是刻度尺的重心;
⑵ 如图所示,将质量为M的物体挂在刻度尺左边某一位置,移动刻度尺,直到刻度尺能够在支座上重新保持水平平衡.记录物体悬挂点到支座的距离L1和刻度尺的 到支座的距离L2;
⑶ 根据杠杆的平衡条件,可以计算出刻度尺的质量m = (用题目中所给物理量表示).
如图所示是“测定滑轮组的机械效率”的装置,实验中测量的有关数据如下表,请你根据表中数据画出实验中滑轮组的绕线,并把正确的数据填入下表空格中.若用该滑轮组把同一个物体提升的高度增大,则机械效率是 (选填“增大”“减小”或“不变”)的.


如图所示,在探究水平面上长方体木块所受摩擦力的实验中,小明用弹簧测力计沿水平方向拉静止的木块,木块表面粗糙程度相同,实验记录如下表所示,由表中信息可知,小明探究了滑动摩擦力的大小与 的关系;当弹簧测力计示数为4.0N时,木块所受的摩擦力大小是 N,此时木块做
(选填“匀速”、“加速”或“减速”)运动,木块开始滑动时受到的摩擦力 (选填“大于”、“小于”或“等于”)匀速运动时受到的摩擦力.
| 拉力大小F/N |
0~3.4 |
3.5 |
3.3 |
| 木块平放 |
静止 |
开始滑动 |
匀速运动 |
| 木块平放 |
静止 |
开始滑动 |
匀速运动 |

小明和小华合作做“研究杠杆平衡条件”的实验
(1)实验前,小明先调节杠杆在水平位置平衡,你认为这样做的好处是 __________ .
(2)小华将四个重力均为0.5N的钩码挂在杠杆左端后,又将弹簧测力计钩在杠杆A处的细线上(如图所示).使杠杆重新在水平位置平衡,目的是 ,且弹簧测力计的示数最小,则小华应沿 ________方向拉弹簧测力计.在此情况下,小华读出弹簧测力计示数为4.2N.小明和小华对实验数据分析后得到的结论是:在误差允许的范围内,动力×动力臂 = 阻力×阻力臂.你认为他们这样就得出结论是否合理?__________ ;简述理由: _____________________________ .
小明在做“探究杠杆的平衡条件”实验中:
(1)实验前调节杠杆右端的平衡螺母,使其在水平位置平衡,在水平位置平衡时杠杆重力的力臂为 .
(2)在图中,杠杆在水平位置平衡后,小明调节左边钩码的个数和位置,使杠杆水平平衡时,测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他 将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1l1= F2l2.小明的失误是 .
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件。
| 测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
| 1 |
1 |
20 |
2 |
10 |
| 2 |
2 |
15 |
1.5 |
20 |
| 3 |
3 |
5 |
|
15 |
(1)如图甲所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向 (选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量 。
(2)实验中测得的数据如表所示,表格中漏填的数据为 N。
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。这个结论与杠杆平衡条件不符,原因是实验过程中______(填字母)。
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
小红在课外探究弹簧的长度跟拉力的变化关系,利用如图所示的装置记录了相应实验数据如下:
| 拉力/N |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
40 |
| 指针的位置/cm |
2 |
3 |
4 |
5 |
6 |
7 |
7.5 |
7.5 |
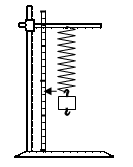
(1)分析实验数据,写出你能得到的结论。
(2)举出该探究在实际应用中的一个实例。
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号