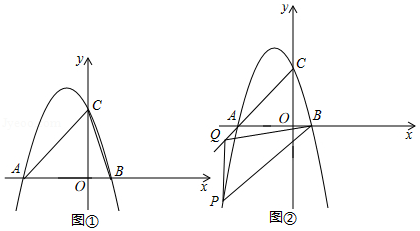
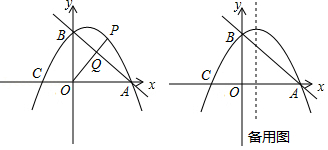
如图①,抛物线 与 轴交于 , 两点(点 位于点 的左侧),与 轴交于点 .已知 的面积是6.
(1)求 的值;
(2)求 外接圆圆心的坐标;
(3)如图②, 是抛物线上一点, 为射线 上一点,且 、 两点均在第三象限内, 、 是位于直线 同侧的不同两点,若点 到 轴的距离为 , 的面积为 ,且 ,求点 的坐标.
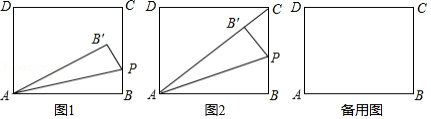
如图1,在矩形 中, ,动点 从 出发,以每秒1个单位的速度,沿射线 方向移动,作 关于直线 的对称 ,设点 的运动时间为 .
(1)若 .
①如图2,当点 落在 上时,显然 是直角三角形,求此时 的值;
②是否存在异于图2的时刻,使得 是直角三角形?若存在,请直接写出所有符合题意的 的值?若不存在,请说明理由.
(2)当 点不与 点重合时,若直线 与直线 相交于点 ,且当 时存在某一时刻有结论 成立,试探究:对于 的任意时刻,结论“ ”是否总是成立?请说明理由.
定义:若实数 , 满足 , ,且 , 为常数,则称点 为“线点”.例如,点 和 是“线点”.已知:在直角坐标系 中,点 .
(1) 和 两点中,点 是“线点”;
(2)若点 是“线点”,用含 的代数式表示 ,并求 的取值范围;
(3)若点 是“线点”,直线 分别交 轴、 轴于点 , ,当 时,直接写出 的值.
学校数学兴趣小组利用机器人开展数学活动.
在相距150个单位长度的直线跑道 上,机器人甲从端点 出发,匀速往返于端点 、 之间,机器人乙同时从端点 出发,以大于甲的速度匀速往返于端点 、 之间.他们到达端点后立即转身折返,用时忽略不计.
兴趣小组成员探究这两个机器人迎面相遇的情况,这里的”迎面相遇“包括面对面相遇、在端点处相遇这两种.
(观察)
①观察图1,若这两个机器人第一次迎面相遇时,相遇地点与点 之间的距离为30个单位长度,则他们第二次迎面相遇时,相遇地点与点 之间的距离为 个单位长度;
②若这两个机器人第一次迎面相遇时,相遇地点与点 之间的距离为40个单位长度,则他们第二次迎面相遇时,相遇地点与点 之间的距离为 个单位长度;
(发现)
设这两个机器人第一次迎面相遇时,相遇地点与点 之间的距离为 个单位长度,他们第二次迎面相遇时,相遇地点与点 之间的距离为 个单位长度.兴趣小组成员发现了 与 的函数关系,并画出了部分函数图象(线段 ,不包括点 ,如图2所示).
① ;
②分别求出各部分图象对应的函数表达式,并在图2中补全函数图象;
(拓展)
设这两个机器人第一次迎面相遇时,相遇地点与点 之间的距离为 个单位长度,他们第三次迎面相遇时,相遇地点与点 之间的距离为 个单位长度.
若这两个机器人第三次迎面相遇时,相遇地点与点 之间的距离 不超过60个单位长度,则他们第一次迎面相遇时,相遇地点与点 之间的距离 的取值范围是 .(直接写出结果)

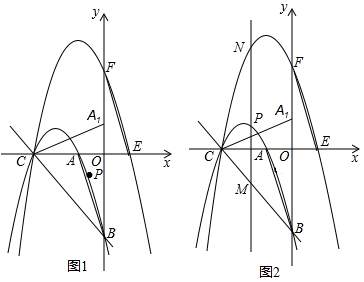
如图所示,二次函数 的图象与一次函数 的图象交于 、 两点,点 在点 的右侧,直线 分别与 、 轴交于 、 两点,其中 .
(1)求 、 两点的横坐标;
(2)若 是以 为腰的等腰三角形,求 的值;
(3)二次函数图象的对称轴与 轴交于点 ,是否存在实数 ,使得 ,若存在,求出 的值;若不存在,说明理由.

已知:如图所示,在平面直角坐标系 中,四边形 是矩形, , ,动点 从点 出发,沿射线 方向以每秒2个单位长度的速度运动;同时,动点 从点 出发,沿 轴正半轴方向以每秒1个单位长度的速度运动.设点 、点 的运动时间为 .
(1)当 时,求经过点 , , 三点的抛物线的解析式;
(2)当 时,求 的值;
(3)当线段 与线段 相交于点 ,且 时,求 的值;
(4)连接 ,当点 , 在运动过程中,记 与矩形 重叠部分的面积为 ,求 与 的函数关系式.

问题情境:如图1,在正方形 中, 为边 上一点(不与点 、 重合),垂直于 的一条直线 分别交 、 、 于点 、 、 .判断线段 、 、 之间的数量关系,并说明理由.
问题探究:在“问题情境”的基础上.
(1)如图2,若垂足 恰好为 的中点,连接 ,交 于点 ,连接 ,并延长交边 于点 .求 的度数;
(2)如图3,当垂足 在正方形 的对角线 上时,连接 ,将 沿着 翻折,点 落在点 处,若正方形 的边长为4, 的中点为 ,求 的最小值.
问题拓展:如图4,在边长为4的正方形 中,点 、 分别为边 、 上的点,将正方形 沿着 翻折,使得 的对应边 恰好经过点 , 交 于点 .分别过点 、 作 , ,垂足分别为 、 .若 ,请直接写出 的长.

如图,在平面直角坐标系中,四边形 的边 在 轴上,点 在 轴的负半轴上,直线 ,且 , ,将经过 、 两点的直线 向右平移,平移后的直线与 轴交于点 ,与直线 交于点 ,设 的长为 .
(1)四边形 的面积为 ;
(2)设四边形 被直线 扫过的面积(阴影部分)为 ,请直接写出 关于 的函数解析式;
(3)当 时,直线 上有一动点 ,作 直线 于点 ,交 轴于点 ,将 沿直线 折叠得到 ,探究:是否存在点 ,使点 恰好落在坐标轴上?若存在,请求出点 的坐标;若不存在,请说明理由.

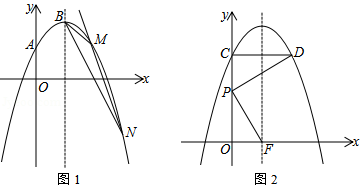
抛物线 与 轴交于点 , (点 在点 的左侧),与 轴交于点 ,其顶点为 .将抛物线位于直线 上方的部分沿直线 向下翻折,抛物线剩余部分与翻折后所得图形组成一个“ ”形的新图象.
(1)点 , , 的坐标分别为 , , ;
(2)如图①,抛物线翻折后,点 落在点 处.当点 在 内(含边界)时,求 的取值范围;
(3)如图②,当 时,若 是“ ”形新图象上一动点,是否存在以 为直径的圆与 轴相切于点 ?若存在,求出点 的坐标;若不存在,请说明理由.

抛物线 经过点 ,与它的对称轴直线 交于点 .
(1)直接写出抛物线 的解析式;
(2)如图1,过定点的直线 与抛物线 交于点 、 .若 的面积等于1,求 的值;
(3)如图2,将抛物线 向上平移 个单位长度得到抛物线 ,抛物线 与 轴交于点 ,过点 作 轴的垂线交抛物线 于另一点 . 为抛物线 的对称轴与 轴的交点, 为线段 上一点.若 与 相似,并且符合条件的点 恰有2个,求 的值及相应点 的坐标.
如图,直线 与 轴交于点 ,与 轴交于点 .抛物线 经过 、 两点,与 轴的另一个交点为 .
(1)求抛物线的解析式;
(2)点 是第一象限抛物线上的点,连接 交直线 于点 .设点 的横坐标为 , 与 的比值为 ,求 与 的函数关系式,并求出 与 的比值的最大值;
(3)点 是抛物线对称轴上的一动点,连接 、 ,设 外接圆的圆心为 ,当 的值最大时,求点 的坐标.
如图1,在平面直角坐标系 中,已知点 和点 的坐标分别为 , ,将 绕点 按顺时针方向分别旋转 , 得到 △ , .抛物线 经过点 , , ;抛物线 经过点 , , .
(1)点 的坐标为 ,点 的坐标为 ;抛物线 的解析式为 .抛物线 的解析式为 ;
(2)如果点 是直线 上方抛物线 上的一个动点.
①若 时,求 点的坐标;
②如图2,过点 作 轴的垂线交直线 于点 ,交抛物线 于点 ,记 ,求 与 的函数关系式,当 时,求 的取值范围.
已知两个二次函数 和 .对于函数 ,当 时,该函数取最小值.
(1)求 的值;
(2)若函数 的图象与坐标轴只有2个不同的公共点,求这两个公共点间的距离;
(3)若函数 、 的图象都经过点 ,过点 , 为实数)作 轴的平行线,与函数 、 的图象共有4个不同的交点,这4个交点的横坐标分别是 、 、 、 ,且 ,求 的最大值.
如图1是一个用铁丝围成的篮筐,我们来仿制一个类似的柱体形篮筐.如图2,它是由一个半径为 、圆心角 的扇形 ,矩形 、 ,及若干个缺一边的矩形状框 、 、 、 , 围成,其中 、 、 在 上, 、 、 与 、 、 分别在半径 和 上, 、 、 、 和 、 分别在 和 上, 于 , 于 , , 、 、 、 依次等距离平行排放(最后一个矩形状框的边 与点 间的距离应不超过 ,
(1)求 的值;
(2)问: 与点 间的距离能否等于 ?如果能,求出这样的 的值,如果不能,那么它们之间的距离是多少?

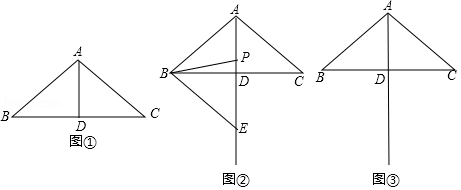
如图①,在 中, , , 是 的中点.小明对图①进行了如下探究:在线段 上任取一点 ,连接 .将线段 绕点 按逆时针方向旋转 ,点 的对应点是点 ,连接 ,得到 .小明发现,随着点 在线段 上位置的变化,点 的位置也在变化,点 可能在直线 的左侧,也可能在直线 上,还可能在直线 的右侧.
请你帮助小明继续探究,并解答下列问题:
(1)当点 在直线 上时,如图②所示.
① ;
②连接 ,直线 与直线 的位置关系是 .
(2)请在图③中画出 ,使点 在直线 的右侧,连接 .试判断直线 与直线 的位置关系,并说明理由.
(3)当点 在线段 上运动时,求 的最小值.
试题篮
() 粤公网安备 44130202000953号
粤公网安备 44130202000953号